人形机器人制作秘籍 全面还原DIY制作过程
单杠时,滑动部分可能会受到一定的作用力,但由于:(1)翻越过程时间很短,对舵机的作用时间不长,(2)有一定的离心力作用,抵消部分重力,(3)该部分受力时,身体质心基本在杠的正上方,力臂很小,对舵机产生的扭矩不大。估计力臂为2cm,重量大小约为2kg,故力矩约为4kg.cm,一只手所受力矩为2kg.cm,小于小舵机的最大力矩5kg.cm,所以不会对舵机产生太大的损坏。
1.3 三维建模
OK,经过以上步骤大家已经得到了一个基本的点线视图,也基本上能完成动作。但为了避免各种碰撞,以及给电池,电路板留下摆放的位置,这时我们需要一个完整的机器人的三维图形,手画还是有点难度的,在这个电脑泛滥的时代,选择一个好的CAD软件来帮助画图上手会很快(偷懒的好办法!),并且不需要特殊的制图工具(省经费的好办法!)这里我们推荐用容易入手并且 以机械为主的绘图软件 SolidWorks 完成机械部分设计。
自学SolidWorks不会太难,因为SolidWorks基本操作都能用鼠标解决,不需要记什么命令(高手可以选择其他更专业的软件),另外SolidWorks有由零件的装配图直接生成工程图,以及自动标注尺寸,基本免了自己动手画,并且绝不会出错,还有模拟运动等高级功能。
关于solidworks的学习这里就不详细讲了,推荐几个网上几个SolidWorks自学教程(去百度google一下有不少,视屏教程最容易入手 看几个例子跟着操作一下基本上就会了) 参考书的话可以准备两本,一本以例子多的例如《solidworks 实例》 一本系统点,供快速查阅的例如 《solidworks?2008 从入门到精通》 (看例子出现问题的时候可以翻翻) 当然,最权威最全面的 就是SolidWorks自带的帮助文档(不推荐,讲的太细,书上找不到解决方法的问题再查阅文档)。这样跟着网上教学视屏练得话几个小时基本上就能上手。
另外,一本机械制图的教材最好还是备上,主要用来了解一些基本符号 术语 以及很关键的 国标——也就是国家规定的标准件。(查到后可以直接在solidworks里面调用画好的零件,方便省事)知道各种标准件的作用,和基本的固定方法。
2 实际模型图制作
以下是用cad软件构建模型的步骤:
具体的连接方式可以先不管,先画出单个舵机,以及各个关键部件(在SolidWorks上画出来) 主要的零件——舵盘,标准螺丝,螺母等。
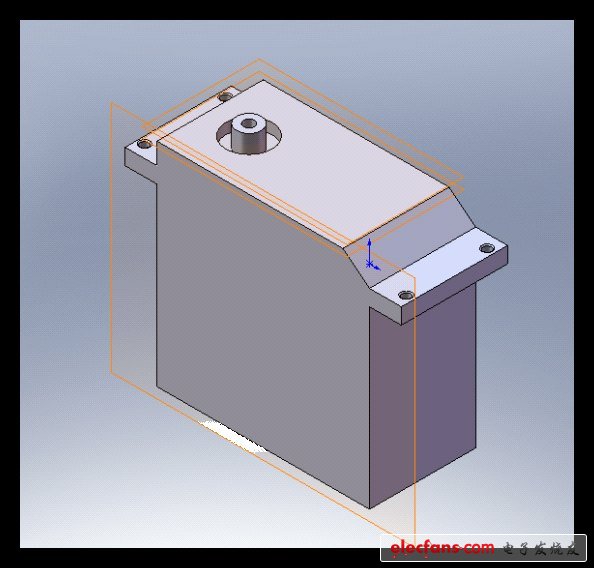
舵机。
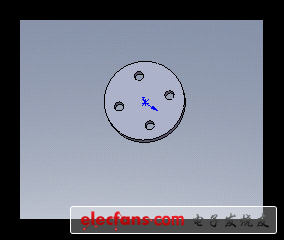
舵盘。
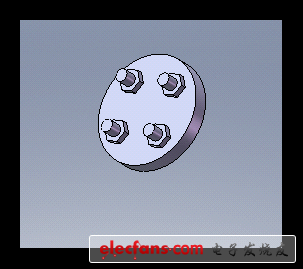
上螺钉的舵盘整体。
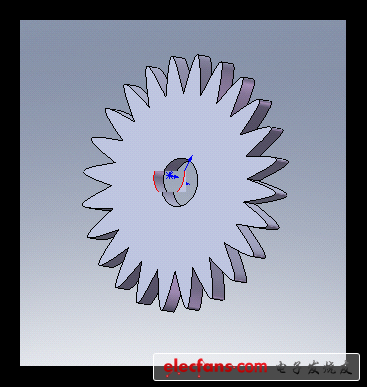
齿轮(自己画的非标准,最后没有用到……)。
Tip1: 舵机的模型最好做精确些,参照具体型号的标准尺寸(推荐实测)。然后参照已经画好的点线模型,将点改成舵机,调整好各部位的距离。
怎样连接两个舵机呢?为了让我们将DIY进行到底,在这里我们选择自己加工强度大重量轻又容易塑形的1.5mm铝板,用如下图这种方式将舵机包起来并与另外的舵机通过轴上固定的舵盘相连。 (这里大家不必拘泥于我们的方法,可以发挥想象力构造自己考虑连接方式。) 在solidworks下将零件组装成装配体。
Tips2: 先把各个包好的部分装配体模块化,再用由上到下的顺序或者由下到上的顺序一个个组装成装配体。(由于不再是点线的简单结构了,在这里还要进行各关节的简单受力分析,尽量通过设计上的改动避免舵机轴承之类脆弱的地方承力。)
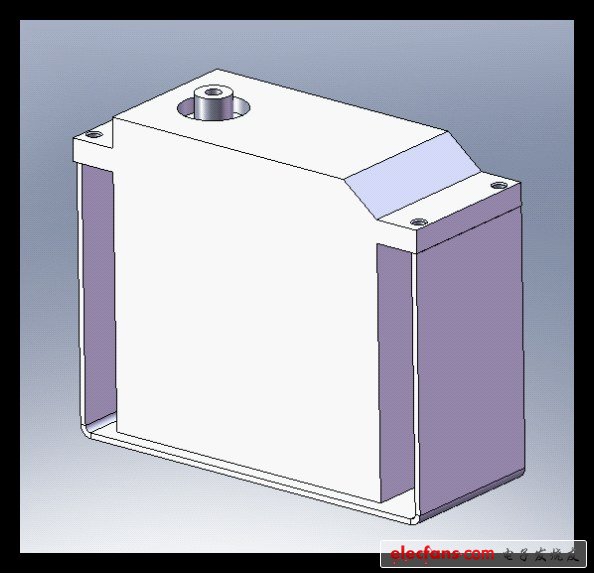
用铝板包好的舵机。
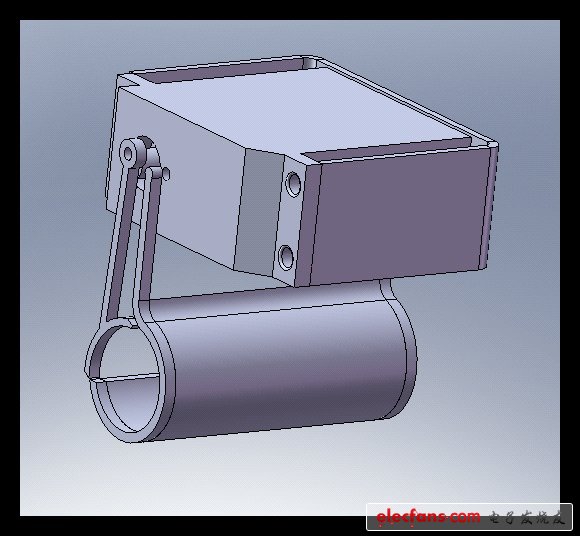
手部的装配图。
整个手臂的装配图。
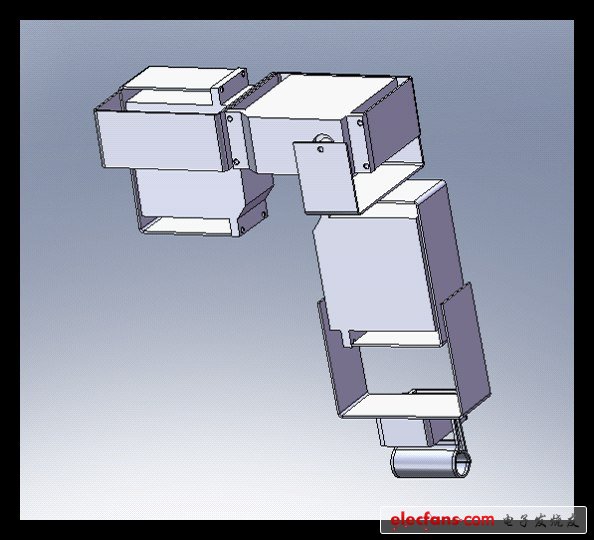
整条腿的装配图。

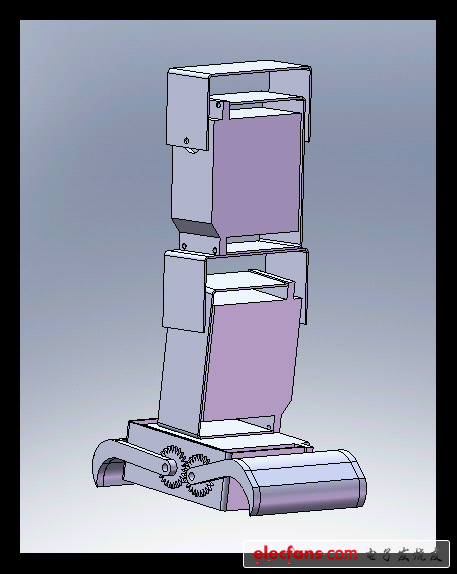
完整的机器人装配图(原始图)。
考虑实际的装配情况,给每个模块之间合理的连接方式,例如用螺钉螺母固定,万能胶,热熔胶,胶带,绳子,弹簧……尽情的发挥你的想象力吧! 一般相对牢固的方式是通过打孔然后用螺钉螺母固定,采用这种方式的同学们一定要注意了!千万别忘了考虑螺钉的大小和位置!!
让我们无视他,继续做下去吧!将实际的问题反映到模型图上,即对模型修改(建议对零件改,不要从装配体上直接改。)
最后检查是否有重叠,碰撞。
3 实际制作
好了,经过了重重检验,一个完美的效果图终于出来了!各种运动我们也分析好了!开始干力气活吧!
别急,现在还什么都没有呢!
3.1 准备工作
买铝板。
买螺丝,螺母,垫片。
准备个五金工具箱。
有台钻,车床,铣床,剪板机,折板机之类大型机器可用最好。
没有的话:用手钻代替台钻(想 DIY台钻 的看过来~),手加台钳代替折板机,铁皮剪或手锯代替剪板机,车床铣床都可以不用。自
- HERMES与可穿戴外骨骼机器人技术详解(02-07)
- 超酷摩托车:您能相信这是学生制作的吗?(06-27)
- 创意制作:LED汽车表情仪DIY制作(07-02)
- 多图详细教你怎样做一部Arduino小车(06-24)
- 国外天才学生DIY 19岁学生造可骑乘液压机器人(07-06)