基于单片机的电动车无线遥控系统设计
反转及停止。
当向C、D 两端输入同样电平时, 可实现电机的快速停止。另外将使能端V en 置零也可以使电机停止。
4 电机的PWM 调速
在直流伺服系统中, 速度调节主要通过改变电枢电压的大小来实现。 经常采用晶闸管相控整流调速或大功率晶体管脉宽调制调速两种方法, 后者简称PWM, 常见于中小功率系统。它采用脉冲宽度调制技术, 其工作原理是: 通过改变"接通脉冲"的宽度, 使直流电机电枢上的电压的"占空比"改变, 从而改变电枢电压的平均值, 控制电机的转速。PWM 电路由四个大功率晶体管组成H 桥电路构成, 四个晶体管分为两组, 交替导通和截至, 用单片机控制达林顿管使之工作在开关状态, 根据调整输入控制脉冲的占空比, 精确调整电动机转速。这种电路由于管子只工作在饱和和截止状态下, 效率非常高。H 型电路使实现转速和方向的控制简单化, 且电子开关的速度很快, 稳定性也极强, 是一种广泛采用的PWM 调速技术。
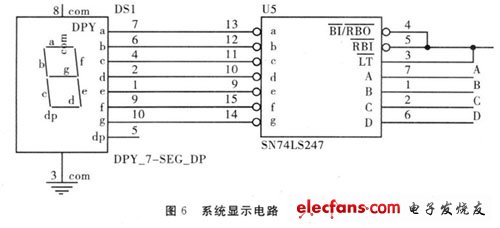
5 显示电路
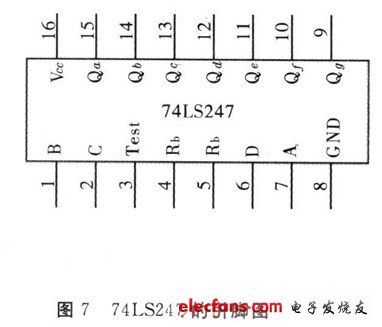
常用的数码显示器件主要有LED 数码显示器和LCD 液晶显示器, 本系统采用LED 显示器。它是用发光二极管( 简称LED) 组成字形来显示数字、文字( 主要是拉丁字母) 和符号的。同一规格的数码管一般都有共阳极和共阴极两种类型。本设计采用共阴型。其电路图如图6 所示。其中74LS247 为译码器, 引脚如图7 所示。
6 结语
本文用红外遥控器来实现电动车的运动状态控制, 利用红外遥控器发送指令, 指令信号经红外接收头接收、处理后转换为脉冲信号, 然后发送到单片机进行译码。单片机译码后, 根据预先编写好的程序, 输出相应的指令, 通过电动机的控制电路, 从而控制电动机的运动, 实现对电动车的运动控制的目的。如把设计中的直流电动机换成伺服电机, 再配合单片机可以精确的控制伺服电机的动作, 凡是需要以单片机控制想要拉动或是做简易的机械式传动的机构设计都可以应用这种设计。
- 基于无线遥控技术的微震电机震动转速控制电路设计(07-29)
- 汽车无线遥控开门技术(06-08)
- 单片机实现无线遥控教鞭(07-05)
- 工程师电子制作故事:1000米4路无线遥控窗帘(图文)(06-24)
- 无线遥控开关电路设计解析—电路图天天读(260)(09-14)
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)