汽车无线遥控开门技术
1 引言
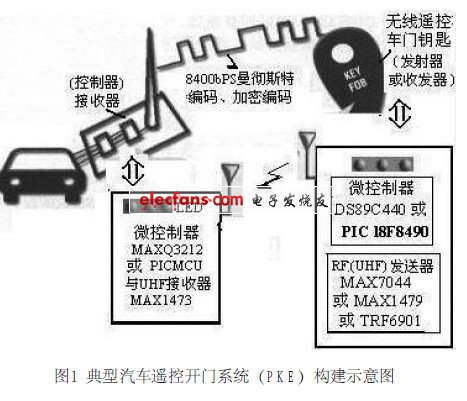
本文将对汽车无线遥控开门系统的新型设计方案与应用发展作分析介绍。汽车安全应用所使用的典型无线遥控开门系统-遥控钥匙(RKE)系统,如图1所示。该系统组成包括一个安装在汽车上的控制器(或称接收器)和一个由用户携带的收发器(或发射器),即无线遥控车门钥匙。收发器一般包括一个微控制器、RF器件以及按钮和LED等人机接口器件。微控制器可用DS89C440或PIC16F639,RF器件可用MAX7044或MAX1479或TRF6901。收发器通常关闭,只在按下按钮或需要发送数据时才工作。收发器用来向控制器发送数据,因此是单向通信。然而,这一情况正在改变。新型智能收发器即可发送数据,也可接收数据,因此是双向通信。在双向通信系统中,控制器(安装在汽车上)和收发器(即车钥匙)可以实现自动通信,不需要人机接口。
2 设计思想
从上述无线遥控开门系统组成可看出,系统方案的设计思想是基于用微控制器构建发射器(遥控钥匙)与接收器。
众所周知,MAXQ系列是采用低噪声设计并为配合模拟电路工作而进行了优化的16位RISC微控制器,能够与RF接收器器件整合到一起构建模拟电路的最佳方案。
2.1 遥控钥匙(发射器或收发器)与接收器(车上控制器)
遥控钥匙可选用DS89C450-KIT和MAX7044或两个评估板(EV KIT),即DS89C450-KIT和MAX7044EVKIT (EVht)构成发射器。可以安装在一个壳体内,充电电池位于下方。如使用天线,发送距离超出标准钥匙链几个数量级。
接收器(车上控制器)可由并排安装在一起的MAXQ3212 16位微控制器和MAXl473接收器组成。其连线接到汽车的车体控制模块(BCM)上。若是在作调试或演示,可使用一个专门的MAXQ3212端口引脚以9600bps发送异步串行数据。
在此之所以采用MAXQ3212 16位微控制器,是因为MAXQ系列是采用低噪声设计并为配合模拟电路工作而进行了优化的16位RISC微控制器,除数字元件外还集成了高精密的模拟功能,因而应用方案需要的芯片数更少,能够与RF接收器器件MAXl473整合到一起构建模拟电路的最佳方案,而且基本不会干扰RF信号。其优异的功耗特性与强大的功能组合使产品的设计和构建更加简单,可缩短产品上市时间。
而RF接收器器件MAXl473是最新的300MHz至450MHzASK(振幅变换调制)射频接收器平均灵敏度为-114dBm,正常工作仅消耗5.5mA(典型值)的电流。内置镜频抑制,无需通常使用的前端SAW滤波器。睡眠模式时,MAXl473可在小于250ps的时间内启动并发送数据,保证了更深的睡眠周期和更长的电池寿命。MAXl473可工作于3V至5V的电源电压。该300MHz至450MHz发送器和接收器的最大优点是能将RKE系统有效距离扩大一倍,可理想应用子电池供电设备,包括钥匙,汽车报警和胎压检测。
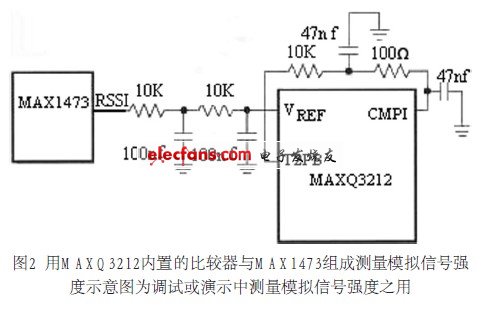
2.2 关于模拟信号强度测量
MAXl473接收器提供一个模拟接收信号强度指示器(RSSl),可对此信号进行测量。MAXQ3212内置一个模拟比较器,以比较VREF和CMPI输入,并可以在定时器输出引脚上产生脉宽调制信号(PWM)。图2示出了由比较器和PWM构建ADC的方法。将RSSI信号送到MAXQ3212比较器的VREF引脚端。然后将定时器编程为PWM模式,如果对该PWM进行适当滤波,就可产生DAC输出到T2PB引脚端,并将输出(即DAC)连接到比较器的另一个输入CMPI引脚端。比较器随后比较信号电平,如果信号匹配,可在没有专用硬件ADC的情况下成功进行了模数转换。
软件中没有采用逐次逼近法,而是采用斜率ADC。从一个合理的最小值开始,DAC输出缓慢增加,直到比较器指示匹配状态。
2.3 RF信号如何解码
MAXl473接收器提供一路数字信号输出(DATAOUT)。由于RF噪声一直存在,无论钥匙链实际上是否在发送数据,该引脚都将连续转换状态。为将该噪声与信号区分开来,MAXQ微控制器必须采用一个小型软件状态机,测量上升沿和下降沿信号之间的时间,以识别前同步码。
而测量边沿间隔的最有效方法是使用中断触发技术。MAXQ可编程为上升沿或下降沿触发中断。将中断设置为"上升沿"触发,即开始测量。一旦探测到上升沿,复位并重启定时器,同时将中断触发边沿设置为"下降"沿。到下降沿时,中断处理程序读取定时器的值。这可用一小段程序以示一个代码段,该代码段读取和复位定时器,然后转换中断触发信号的极性。如果边沿间隔与8400bps数据率(加/减一个合理的容限)匹配,并检测到协议所指定的同步脉冲数,则微控制器软件状态机切换到接收模式,开始解析余下的数据包。
2.4 关于数据流--曼彻斯特编码的使用
由于制造商
- 基于无线遥控技术的微震电机震动转速控制电路设计(07-29)
- 单片机实现无线遥控教鞭(07-05)
- 基于单片机的电动车无线遥控系统设计(10-17)
- 工程师电子制作故事:1000米4路无线遥控窗帘(图文)(06-24)
- 无线遥控开关电路设计解析—电路图天天读(260)(09-14)
- 严酷的汽车环境要求高性能电源转换(08-17)