移动设备的触摸传感技术研究
智能手机等新型消费电子产品使得触摸屏开始风靡,触摸传感器提供方便的控制方式,几乎可用于控制任何类型的设备。
触摸传感控制器目条件供一些通用的性能选项和形态,如滑块和邻近传感器。触摸传感器技术的进步使传感器驱动型接口更易于实现,对终端用户更为直观和简单。
大多数触摸传感控制器依据所检测到的电容变化来工作(见图1)——当某种物体或某个人接近或触摸传感器的导电金属片时,手指与金属片之间的电容发生变化。导电物体(如手指)在传感器四周移动将改变电容传感器的电场线并使电容发生变化。控制电路可测出电容的变化。
产业应用系统从多年前开始就使用这种电容检测技术来丈量液位、湿度和材料成份。这种从这些应用发展而来的技术逐渐演化成人机接口。
触摸传感器接口通常通过丈量与传感器垫片相连的电路的阻抗来检测电容变化。触摸控制器周期性地丈量传感器输进通道的阻抗并用这些值来导出一个内部基准,即校准阻抗。控制器以这个阻抗值为基础判定是否发生了触摸事件。
下面的简化公式表明了手指逼近对触摸垫片电容产生的主要影响。这个公式可用于确定传感器垫片的电容和强度。

* C表示电容,单位为法拉
* A是单个金属垫片的面积,单位为平方米
* εr是金属垫片间材料的相对静态介电常数(真空=1)
* ε0是自由空间的介电常数=8.854&TImes;10(SUP/)-12(/SUP)F/m
* D是板之间的间隔或间隔,单位为米。
另外,触摸强度随压力、触摸面积或电容的增加而增大。D减小等价于电容增大或触摸强度增大。
这个方程表明,覆膜厚度及其介电常数对触摸强度影响很大。该方程还表明,电容传感器本质上对四周环境和触摸激励的特性敏感——不管触摸来自手指、乙烯基、橡胶、棉花、皮革或水(见图1)。
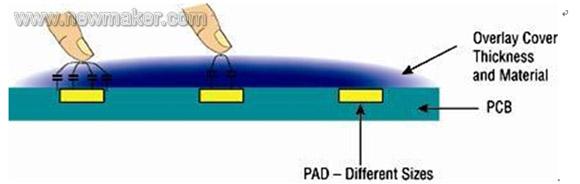
图1:触摸灵敏度依靠于覆膜材料、垫片尺寸和厚度
表1列出了各种常用覆膜材料的介电常数。我们可以基于这些值来考察触摸传感器在厨房中的应用,由于在厨房中这些传感器很轻易溅上食用油。
表1:介电常数
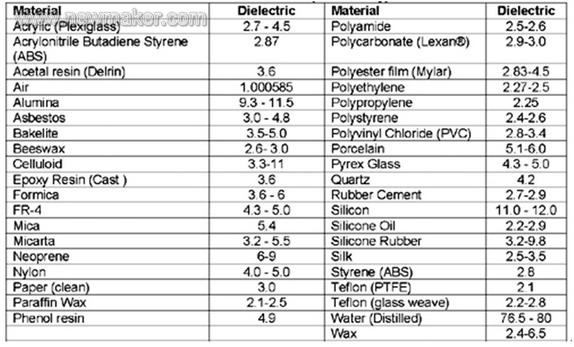
典型的食用油如橄榄油或杏仁油的介电常数在2.8-3.0之间。石蜡在华氏68度时的介电常数在2.2-4.7之间。这些材料的介电常数接近甚至小于传感器常用覆膜聚碳酸脂(2.9-3.2)或ABS材料(2.87-3.0)的介电常数。因而,油对传感器的操纵没有多大影响。
相反,甘油的介电常数在47-68之间,水的介电常数约为80。尽管这些材料的介电常数比覆膜材料高,对于使用数字触摸检测技术(如ATLab公司开发并拥有产权的FMA1127触摸传感器控制器所使用的技术)的触摸传感器来说,由于传感器垫片和溅上的液体都没有接地,溅上这些液体不会引起任何异常行为。
尽管触摸传感器的操纵细节和接口依靠于具体的应用,一般来说,容性传感器接口电路和检测方法有模拟和数字两种类型。一种模拟技术是丈量频率或工作周期,这些量由于在手指和地之间引进额外的电容而发生变化
利用这种技术和高分辨率的模数转换器(ADC),可以把测到的模拟电压转换成数字代码。得益于混合信号技术的进步,最新款的电容/数字转换器把高性能模拟前端与低功率高性能ADC集成在一起。
模拟接口电路的一个缺点是容性传感器可能会受到难以捉摸的噪声、串扰、耦合的影响。另外,传感器输出的动态范围受到电源电压的限制,而随着半导体制造技工艺节点的缩小该电源电压在不断降低。
假如使用深亚微米CMOS技术把传感器电路与复杂的数字信号处理模块集成到相同的基底上,情况会变得更具挑战性。为避免外部干扰,该器件可能会要求使用软件工作区,这增加了与之接口的微控制器的存储器开销和性能开销。
全数字传感方法(见图3)可避免与模拟方法有关的题目。数字方法通过使电容成为RC延时线的一部分来检测传感器电容的变化。
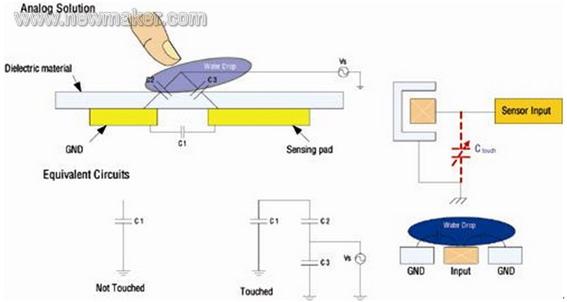
图3:数字触摸方案;在存在水滴时仍具有鲁棒的性能
图3中简单的全数字型时间/数字转换器(TDC)丈量该延时线相对于基准RC延时线的差并输出阻抗的变化。寄生电容对RC延时的影响可通过加电补偿来消除。
手指碰到传感器垫片使电容增大进而进步了RC延时时间并导致阻抗变化。把这个阻抗与校准阻抗对比可确定是否发生了触摸事件。该传感方案很轻易通过调整RC延时线的电阻来改善性能。
MCU接口
不管使用模拟方法还是数字方法,触摸传感器控制器都可以使用简单的SPI或I(SUP/)2(/SUP)C接口与微控制器相连。MCU(主)通常以主从模式与触摸传感器控制器(从)进行数据交换。
假如MCU没有这样的串行接口,可以
- 智能手机市场战火连天,汽车应用未能幸免(10-06)
- 基于智能手机用八通道模拟开关ISL54230及其应用方案(03-24)
- Android智能手机平台多分辨率解决方案详解(02-14)
- 智能手机触摸屏维修暴利大起底:成本30维修300元(07-02)
- 基于IMS的双模智能手机系统的设计(07-18)
- 智能手机的重要部分:触控技术了解(02-05)