步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
,理想的功率驱动器应使通过绕组的电流脉冲尽量接近矩形波。但由于步进电动机绕组有很大的电感,要做到这一点是有困难的。
常见的步进电动机驱动电路有二种:
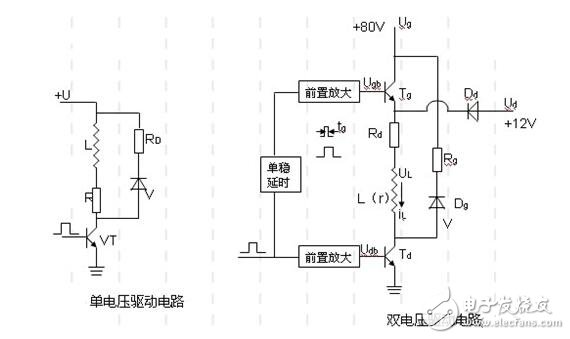
图4.6 步进电机驱动电路
(1)单电压驱动电路
这种电路采用单一电源供电,结构简单,成本低,但电流波形差,效率低,输出力矩小,主要用于对速度要求不高的小型步进电动机的驱动,图6-19所示步进电动机的一相绕组驱动电路(每相绕组的电路相同)。
当环形分配器的脉冲输入信号 ![]() 为低电平(逻辑0,约1V)时,虽然VT1
为低电平(逻辑0,约1V)时,虽然VT1![]() 、
、![]() 管都导通,但只要适当选择
管都导通,但只要适当选择 的阻值,使
的阻值,使![]() 《0(约为-1V),那么
《0(约为-1V),那么![]() 管就处于截止状态,该相绕组断电。当输入信号
管就处于截止状态,该相绕组断电。当输入信号 ![]() 为高电平3.6V(逻辑1)时。
为高电平3.6V(逻辑1)时。![]() 》0(约为0.7V),
》0(约为0.7V),![]() 管饱和导通,该相绕组通电。
管饱和导通,该相绕组通电。
(2)双电压驱动电路 又称高低压驱动电路,采用高压和低压两个电源供电。在步进电动机绕组刚接通时,通过高压电源供电,以加快电流上升速度,延迟一段时间后,切换到低压电源供电。这种电路使电流波形、输出转矩及运行频率等都有较大改善。
当环形分配器的脉冲输入信号![]() 为高电平时(要求该相绕组通电),二极管
为高电平时(要求该相绕组通电),二极管 的基极都有信号电压输入,使均导通。于是在高压电源作用下(这时二极管
的基极都有信号电压输入,使均导通。于是在高压电源作用下(这时二极管![]() 两端承受的是反向电压,处于截止状态,可使低压电源不对绕组作用)绕组电流迅速上升,电流前沿很陡。当电流达到或稍微超过额定稳态电流时,利用定时电路或电流检测器等措施切断
两端承受的是反向电压,处于截止状态,可使低压电源不对绕组作用)绕组电流迅速上升,电流前沿很陡。当电流达到或稍微超过额定稳态电流时,利用定时电路或电流检测器等措施切断![]() 基极上的信号电压,于是
基极上的信号电压,于是![]() 截止,但此时
截止,但此时![]() 仍然是导通的,因此绕组电流即转而由低压电源经过二极管
仍然是导通的,因此绕组电流即转而由低压电源经过二极管![]() 供给。当环形分配器输出端的电压
供给。当环形分配器输出端的电压![]() 为低电平时(要求绕组断电),
为低电平时(要求绕组断电),![]() 基极上的信号电压消失,于是
基极上的信号电压消失,于是![]() 截止,绕组中的电流经二极管
截止,绕组中的电流经二极管![]() 及电阻
及电阻![]() 向高压电源放电,电流便迅速下降。采用这种高低压切换型电源,电动机绕组上不需要串联电阻或者只需要串联一个很小的电阻
向高压电源放电,电流便迅速下降。采用这种高低压切换型电源,电动机绕组上不需要串联电阻或者只需要串联一个很小的电阻![]() (为平衡各相的电流),所以电源的功耗比较小。由于这种供压方式使电流波形得到很大改善,所以步进电动机的转矩一频率特性好,启动和运行频率得到很大的提高。
(为平衡各相的电流),所以电源的功耗比较小。由于这种供压方式使电流波形得到很大改善,所以步进电动机的转矩一频率特性好,启动和运行频率得到很大的提高。
步进电机的闭环控制
同开环控制系统相比,闭环控制具有一系列优点。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)