加速度传感器工作原理及应用
可穿戴设备当中传感器至关重要,其中的加速度传感器能够完成位置及姿势的识别。本文通过对三轴传感器工作原理的解析,帮助读者更好的理解加速度传感器的应用。
一、加速度传感器工作原理
加速度传感器自然是对自身器件的加速度进行检测。其自身的物理实现方式咱们就不去展开了,可以想象芯片内部有一个真空区域,感应器件即处于该区域,其通过惯性力作用引起电压变化,并通过内部的ADC给出量化数值。
对于三轴加速度传感器,其能检测X、Y、Z的加速度数据,如下图:
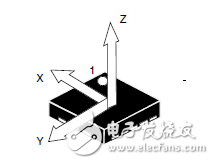
在静止的状态下,传感器一定会在一个方向重力的作用,因此有一个轴的数据是1g(即9.8米/秒的二次)。在实际的应用中,我们并不使用跟9.8相关的计算方法,而是以1g作为标准加速度单位,或者使用1/1000g,即mg。既然是ADC转换,那么肯定会有量程和精度的概念。在量程方面,Lis3dh支持(+-)2g/4g/8g/16g四种。一般作为计步应用来说,2g是足够的,除去重力加速度1g,还能检测出1g的加速度。至于精度,那就跟其使用的寄存器位数有关了。Lis3dh使用高低两个8位(共16位)寄存器来存取一个轴的当前读数。由于有正反两个方向的加速度,所以16位数是有符号整型,实际数值是15位。以(+-)2g量程来算,精度为2g/2^15= 2000mg/32768 =0.061mg。
当以上图所示的静止状态,z轴正方向会检测出1g,X、Y轴为0.如果调转位置(如手机屏幕翻转),那总会有一个轴会检测出1g,其他轴为0,在实际的测值中,可能并不是0,而是有细微数值。
在运动过程中,x,y,z轴都会发生变化。计步运动也有其固有的数值规律,因为迈步过程也有抬脚和放脚的规律过程,如下图。"脚蹬离地是一步的开始,此时由于地面的反作用力,垂直方向加速度开始增大,当脚达到最高位置时,垂直方向加速度达到最大;然后脚向下运动,垂直加速度开始减小,直到脚着地,垂直加速度减到最小值。接着下一步迈步。前向加速度由脚与地面的摩擦力产生,双脚触地时增大,一脚离地时减小。"

二、加速度传感器应用

1. 静止时进行运动检测
使用OR电路工作方式,设置一个较小的运动阈值,只检测X,Y轴数据是否超过该阈值(Z轴这时有1g,咱不管这个轴了)即可。只要X,Y任一轴数据超过阈值一定时间即认为设备处于wakeup状态了。
2. 失重检测
失重时Z轴的加速度和重力加速度抵消,在短时间内会为0,而且X,Y轴没有变化,因此在短时间内三者都为0。这里使用AND电路工作方式,设置一个较小的运动阈值,当三个方向的数据都小于阈值一定时间时即认为是失重。
3. 位置姿势识别
例如手机翻转等应用场景就是利用这个特性。
- MEMS加速度传感器在胎儿心率检测仪中的应用(11-19)
- 基于加速度传感器的地震检波器设计(02-14)
- 基于加速度传感器的低功耗冲击记录仪的实现(06-15)
- 浅析加速度传感器在高速铁路中的应用(06-15)
- 基于BP神经网络的手势识别系统(06-14)
- 详解加速度传感器的几种应用(03-27)