视觉方案做ADAS,单目和双目到底有什么差别?
无法对非标准障碍物进行判断;距离并非真正意义上的测量,准确度较低。
双目系统成本比单目系统要高,但尚处于可接受范围内,并且与激光雷达等方案相比成本较低;二是没有识别率的限制,因为从原理上无需先进行识别再进行测算,而是对所有障碍物直接进行测量;三是精度比单目高,直接利用视差计算距离;四是无需维护样本数据库,因为对于双目没有样本的概念。
双目系统的一个难点在于计算量非常大,对计算单元的性能要求非常高,这使得双目系统的产品化、小型化的难度较大。所以在芯片或FPGA上解决双目的计算问题难度比较大。国际上使用双目的研究机构或厂商,绝大多数是使用服务器来进行图像处理与计算的;也有部分将算法进行简化后,使用FPGA进行处理。目前,中科慧眼在芯片上的计算效率已经达到15fps,在FPGA+ARM架构上的计算效率达到了40fps。
另一个难点在于双目的配准效果。通过双目摄像头的图像配准可以计算生成表示距离的二维图像。下图是中科慧眼双目方案对实际场景信息采集与计算得到的距离的对应关系,不同饱和度颜色代表不同距离,从暖色调至冷色调为距离由近及远。在计算过程中,需要对噪点与空洞做很好的抑制。从右图可以看出,色调(距离)是平滑过渡,没有跳变。

△中科慧眼距离计算获得的二维图像
一些FPGA方案中有很多噪点与空洞,对后续计算不利,存在安全风险。对于小障碍物的识别,既要做到没有杂点和空洞,又要表现细节。否则比如一条横着的栏杆无法识别,会增加驾驶的风险。下面的图表现的是小物体和行人的探测上中科慧眼双目方案与国际上其他算法的对比。
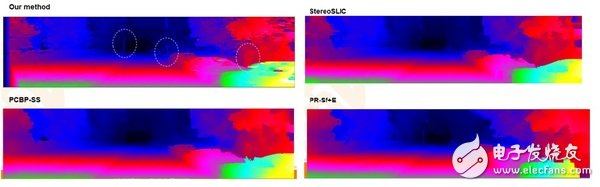
△Our为中科慧眼算法小障碍物的双目配准效果,其它为国际流行传统方法的处理效果
小结
因为检测原理上的差异,双目摄像头在距离测算上相比单目有自己的特点,其硬件成本和计算量级的加倍,是难关也是突破口。就像谷歌自动驾驶汽车不断积累大量的经验和使用数据,才可能一步步积累实现自动驾驶。中科慧眼的双目产品目前完成了样机,也正在进行大规模路测。从产品理论技术原型走到真正被用户接受的产品,还有很长的路要走。
ADAS 相关文章:
- 高级驾驶辅助系统的采用即将出现改变(05-04)
- 瑞萨电子3大ADAS检测系统解决方案简述(02-08)
- 飞思卡尔多摄像头全景泊车辅助系统与ADAS产品(02-08)
- 本土主动安全潜力无限,知名厂商汽车安全精华(03-01)
- 强化射频与MCU性能 车用77GHz雷达性价比攀升(03-03)
- 基于视觉的ADAS解决方案,近在咫尺!(05-07)