盘点无人机避障技术原理及厂商
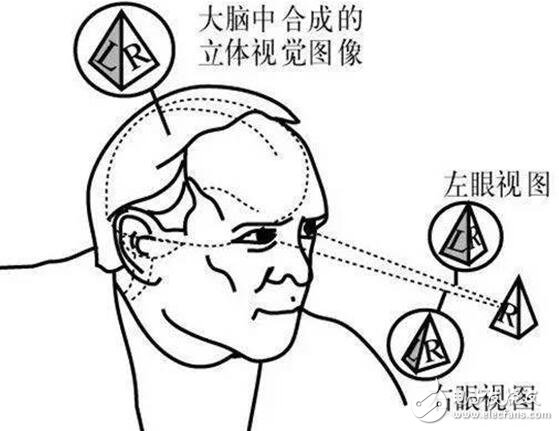
是计算机视觉的一种重要形式,这和人眼感知物体三维信息的原理相似。参照下面这个有趣图片。
而夜间避障是采用了这个主动近红外照射技术,简单来说就是加了一个特殊的手电筒和并改造了眼睛。夜间这个眼睛几乎看不到(和现有大疆产品一样),而极飞采用的双目是由两个黑白镜头组成,从380-1080nm 波段都可以成像,也就意味着不仅能看见可见光,还能看见人眼也看不见的红外线。

(中间长条装为发射,两侧为接收)
无人机会主动发射近红外线光线,近红外光是介于可见光和中红外光之间的电磁 波,虽然人眼看不到,但能作为夜晚的光源,双目的每一个镜头就能接收到环境中的红外线的反馈,经过双目计算后(和白天的计算处理相同)就可以「感知」到环境和障碍物了。而且避障距离和白天相比没有变化,都是 30 米(角度:水平 FOV 65°)。
其实这个原理并不是极飞所创造,它在军事当中运用很早,在美、德等国二战期间,第一代的主动红外探测装置用在了战场上,通过自带的光源设备主动产生近红外辐射照射目标区域,然后接收目标返回的红外信号,转换为可视图像进行观察分析。例如德国研制的车载主动红外夜视仪可用于夜间无灯光条件下隐蔽行进,并通过这种手段避开同盟国的监视,秘密地把 V-2 导弹运送到前线。
而说到这里,目前所有的民用无人机都不能在夜间或者说光线不好的情况下避障吗?其实不然,我们可以看看那些本来见光死的避障无人机,在晚上是不是能够活过来。
5、美国俄亥俄州的公司Oculii:四维雷达技术
传统的民用雷达大多只能提供二维的信息,但是,人们都生活在三维的空间里,二维信息是远远不够的。举例来说,现在的民用雷达都无法测量车子的高度,而这对于无人驾驶、无人机等方面的应用就有很大的局限性。位于美国俄亥俄州的公司Oculii,开发了世界上第一个可以商用的四维雷达,使得无人机在三维空间,获取上下左右的空间信息。
小结:未来无人机不只会采取单一技术实现避障功能,可能会采取多种避障技术集成的手段来实现不同场景下的避障。
- 2015年无人机技术琅琊榜盘点(02-16)
- Top5无人机厂商的先进技术(02-19)
- 无人机有哪些关键技术?(03-27)
- 深扒打造小米无人机的公司飞米科技(04-26)
- 无人机发展的技术难点分析(05-01)
- 干货:无人机有三法可避开黑飞(05-02)