揭秘扫地机器人是如何做室内定位的
上已经出现较为成熟的基于信标定位的信标定位扫地机器人,如Proscenic的模拟GPS卫星三点定位技术,iRobot的Northstar导航定位技术,但由于其价格较为昂贵,它们都用于相对高端的产品中。
环境地图模型匹配定位
是机器人通过自身的各种传感器探测周围环境,利用感知到的局部环境信息进行局部的地图构造,并与其内部事先存储的完整地图进行匹配。通过匹配关系获得自己在全局环境中的位置,从而确定自身的位置。该方法由于有严格的条件限制,只适于一些结构相对简单的环境。

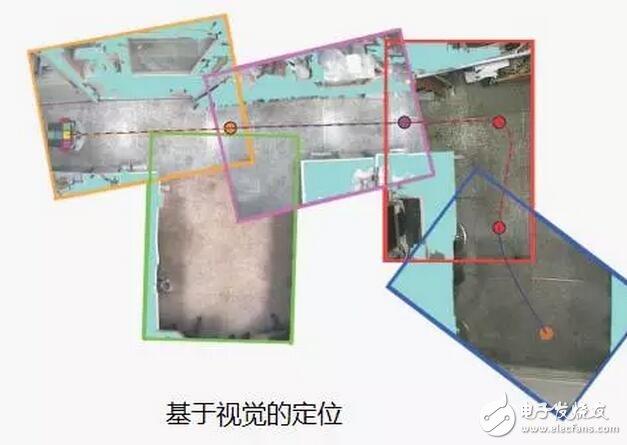
基于视觉的定位
科学研究统计表明,人类从外界获得信息量约有75%来自视觉,视觉系统是机器人与人类感知环境最接近的探测方式。受益于模式识别、机器视觉的发展,基于视觉的机器人定位近年来成为研究热点。
基于视觉的定位主要分为单目视觉、双目视觉。
单目视觉无法直接得到目标的三维信息,只能通过移动获得环境中特征点的深度信息,适用于工作任务比较简单且深度信息要求不高的情况,如果利用目标物体的几何形状模型,在目标上取3个以上的特征点也能够获取目标的位置等信息,但定位精度不高。
双目立体视觉三维测量是基于视差原理的,即左相机像面上的任意一点只要能在右相机像面,上找到对应的匹配点,就可以确定出该点的三维信息,从而获取其对应点的三维坐标。目前,基于视觉定位的扫地机器人也已有产品推出,iRobot和Dyson分别于2015年及2014年推出了基于视觉定位的高端扫地机器人 RoomBa980和360Eye。
小结
自主定位是扫地机器人自主路径规划的基础。经过多年的研究,虽然受成本、生产等因素的制约,航位推算法仍然是目前采用最广泛的定位方法,但通过算法优化,利用混合定位,可以减小其误差带来的影响。而且,随着视觉定位等较高定位精度的定位方法的进一步成熟,其成本也将逐步下降,并将从高端市场逐渐推向大众市场,到时候扫地机器人的定位精度,智能化水平都将有普遍的提升。
- 你知道扫地机器人是怎样规划路径的吗?(05-06)
- 扫地机器人室内定位技术解析(05-08)
- 揭秘扫地机器人是如何进行室内定位的(09-25)
- 如何正确选购扫地机器人之规划式机器人篇(10-02)
- 一篇文章带你认识“扫地机器人”(11-13)
- 扫地机器人的三大侦测感应系统原理(04-16)