你知道扫地机器人是怎样规划路径的吗?
路径规划技术是扫地机器人研究的核心内容之一,机器人定位与环境地图构建就是为路径规划服务的。所谓机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务。
通常,移动机器人路径规划需要解决3个问题:
1)使机器人能从初始位置运动到目标位置;
2)用一定的算法使机器人能绕开障碍物,并且经过某些必须经过的点完成相应的作业任务;
3)在完成以上任务的前提下,尽量优化机器人运行轨迹。
移动机器人的路径规划根据其目的的不同可以分为两种,一种是传统的点到点的路径规划,另一种就是完全遍历路径规划。
点到点的路径规划是一种从起始点到终点的运动策略,它要求寻找一条从始点到终点的最优(如代价最小、路径最短、时间最短)并且合理的路径,使移动机器人能够在工作空间顺利地通行而不碰到任何障碍物。完全遍历路径规划是一种在二维工作空间中特殊的路径规划,指在满足某种性能指标最优或准优的前提下,寻找一条在设定区域内从始点到终点且经过所有可达到点的连续路径。
对于扫地机器人来说,其作业任务是清扫房间,它的路径规划属于完全遍历路径规划,需满足两个指标:遍历性和不重复性。所谓遍历性是指扫地机器人运动轨迹需要最大程度的遍布所有可大空间,它反映的是机器人的工作质量问题。所谓不重复性是指扫地机器人的行走路线应尽量避免重复,反映的是机器人的工作效率问题。
扫地机器人的自主寻路可以分为两种:随机覆盖法和路径规划式。
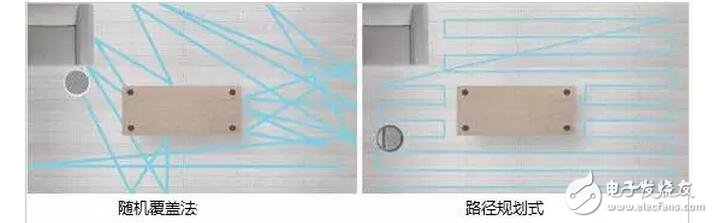
| 随机覆盖法
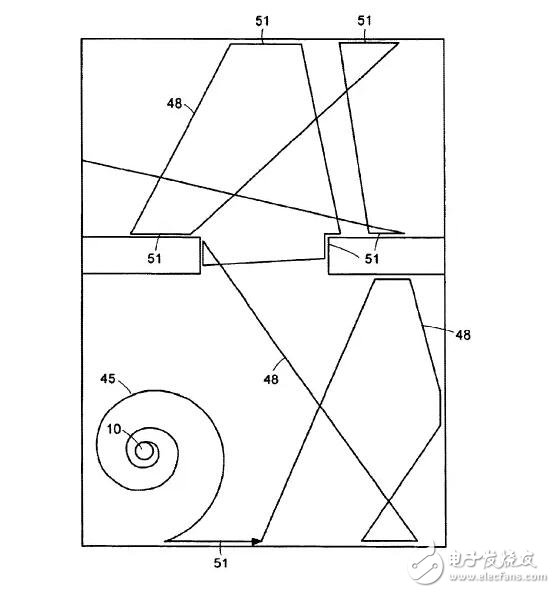
随机覆盖法,有人也称为随机碰撞式导航,但这并非是指机器人真正与环境中的物体产生碰撞,也非毫无章法的在地板上随机移动,换言之在工程操作中"随机"也是一个难以达到要求,随机覆盖法是指机器人根据一定的移动算法,如三角形、五边形轨迹尝试性的覆盖作业区,如果遇到障碍,则执行对应的转向函数。这种方法是一种以时间换空间的低成本策略,如不计时间可以达到 100%覆盖率。随机覆盖法不用定位、也没有环境地图,也无法对路径进行规划,所以其移动路径基本依赖于内置的算法,算法的优劣也决定了其清扫质量与效率的高低。
美国iRobot公司研发的iRobot Roomba 3-8系列是随机碰撞寻路系统的典型代表。
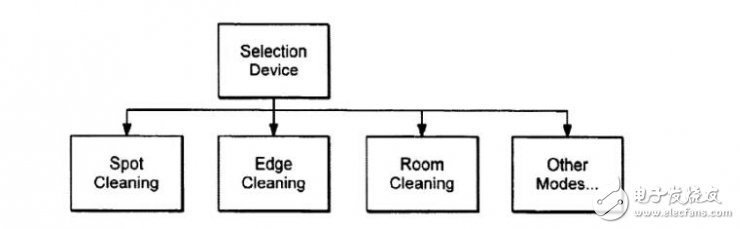
据称,其采用iAdapt智能化清扫技术的专利技术,这是一种软、硬件相结合的智能化AI清扫系统,硬件由Roomba前方的若干红外探测器、底部灰尘侦测器和落差传感器、毛刷胶刷边刷测速系统等等组成,通过Roomba的硬件传回的信息,iRobot自身的软件可以对回传信息进行分析,根据红外回传信息的强度、范围、高度、转速、电流大小、阻力等参数,计算出前方障碍物大致形状,再经过软件的处理运算,得出的结果就是Roomba下一步清洁方式,Roomba以每秒60次的速度计算周边障碍物的情况,同时根据所处环境作出40余种清扫动作,如围绕、折返、螺旋、贴边、转身等等。
其次iRobot采用面积模糊判定算法,根据房间面积自动设定清扫时长。和路径规划不同的是,Roomba开始收集算法估算所需的两个重要参数:单次行进距离和单位时间碰撞频率。单次行进距离越长则间接代表房间面积越大,走几步就调头则间接代表房间面积较小。每次碰撞Roomba都能收集到相关信息,单位时间内碰撞频率越高代表房间面积越小,碰撞频率低则表示需要清扫的面积较大。
市面上大多数扫地机器人虽都采用随机碰撞寻路方式,然而清洁效率却差异很大,归根到底还是软件算法上的问题,这也是为什么同样大家买的都是随机碰撞寻路方式的扫地机器人,在覆盖率与效率上面却有天壤之别。
| 路径规划式
规划式导航需要建立起环境地图并进行定位。对路径规划的研究已经持续很多年了,也提出了很多种类的方法。不同的方法有各自的优缺点,适用范围各不相同,没有一种路径规划方法能适用于所有的环境信息。其中的人工势场法、栅格法、模板模型法、人工智能法等是路径规划中很典型的方法,并且受到越来越多的关注。下面将分别介绍上述这些典型的路径规划方法。
1.人工势场法
人工势场法是机器人导航中提出的一种虚拟力法,其基本方法是将机器人在周围环境中的运动设计成在一种势场中的运动,是对机器人运动环境的一种抽象描述,机器人在场中具有一定的抽象势能,势能源有两种:斥力极和引力极。
机器人在不希望进入的区域和障碍物属于斥力极:目标及机器人系统建议通过的区域为引力极。在极的周围产生相应的势,在任何一点的势为该点产生的势之和。该势的
- 扫地机器人室内定位技术解析(05-08)
- 揭秘扫地机器人是如何进行室内定位的(09-25)
- 如何正确选购扫地机器人之规划式机器人篇(10-02)
- 揭秘扫地机器人是如何做室内定位的(10-23)
- 一篇文章带你认识“扫地机器人”(11-13)
- 扫地机器人的三大侦测感应系统原理(04-16)