让机器人实现避障6种的方,图文详解
时间:10-24
来源:网络整理
点击:
触发,也就无法避障。
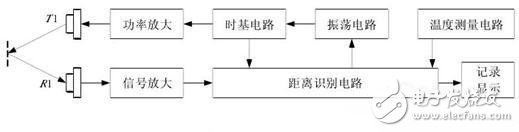
激光雷达避障控制法
近年来,激光雷达在移动机器人导航中的应用日益增多。这主要是由于基于激光的距离测量技术具有很多优点,特别是其具有较高的精度。
激光雷达与其它距离传感器相比,能够同时考虑精度要求和速度要求,这一点特别适用于移动机器人领域。此外,激光雷达不仅可以在有环境光的情况下工作,也可以在黑暗中工作,而且在黑暗中测量效果更好。不过,该传感器也有一些相应的缺点,比如安装精度要求高、价格比较昂贵等。
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)