机器人自主移动的秘密,从SLAM技术说起
时间:10-21
来源:网络整理
点击:
存储方式。
当你打开手机中的导航软件,在选择前往目的地的最佳路线之前,首先要做的动作是什么呢?没错,就是定位。我们要先知道自己在地图中的位置,才可以进行后续的路径规划。
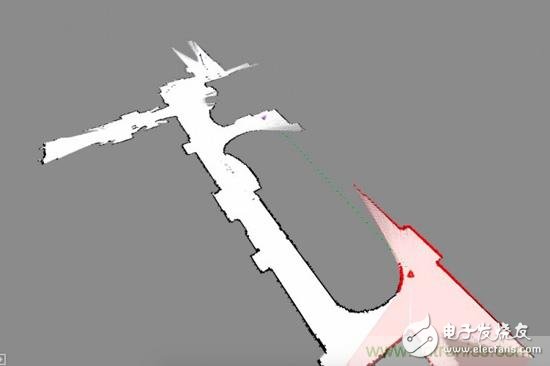
在机器人实时定位问题中,由于通过机器人运动估计得到的机器人位置信息通常具有较大的误差,我们还需要使用测距单元得到的周围环境信息更正机器人的位置。
目前,常见的测距单元包括激光测距、超声波测距以及图像测距三种。其中,凭借激光良好的指向性和高度聚焦性,激光雷达已经成为移动机器人的核心传感器,同时它也是目前最可靠、最稳定的定位技术。
自1988年被提出以来,SLAM的理论研究发展十分迅速。在实际应用时,除配备激光雷达外,还需要机器人具有IMU(惯性测量单元)、里程计来为激光雷达提供辅助数据,这一过程的运算消耗是巨大的,传统上需要PC级别的处理器,这也成为限制SLAM广泛应用的瓶颈之一。
- 三方面详解如何为机器人构建起一个“三维世界”(02-04)
- SLAM技术,让真正的智能机器人触手可及(02-16)
- 揭秘机器人自主移动背后技术,从SLAM技术说起(10-22)
- 自主移动机器人的定位与地图创建(SLAM)关键性问题(02-07)
- 解密英伟达Tesla P100、GP100、DRIVE PX2平台(04-26)
- 人工智能处理器三强Intel/NVIDIA/AMD谁称霸?(07-23)