工业电机驱动IGBT过流和短路保护的问题及处理方法
对于直流总线电流检测电路,必须加一个小型滤波器,避免误 触发,因为直流总线电流由于潜在的高噪声电流而断续。采用 具有3 μs时间常数的RC滤波器。检测到过流后,其余有关IGBT关 断的延迟是通过运算放大器、比较器、信号隔离器、ADSP-CM408F 中的跳变响应时间,以及栅极驱动器传播延迟。这会额外增 加0.4 μs,使得故障至关断的总时间延迟为3.4 μs——远低于很 多IGBT的短路时间常数。类似的时序同样适用于采用AD7403以 及ADSP-CM408F处理器上集成式过载检测sinc滤波器的电机相位 电流检测。采用时间常数为3 μs左右的sinc滤波器可良好运作。8 在这种情况下,其余系统延迟的原因仅会是跳变信号内部路由 至PWM单元以及存在栅极驱动器传播延迟,因为过载sinc滤波器 是处理器的内部元件。连同电流检测电路或快速数字滤波器的 反应时间,无论使用何种方法,两种情况下的ADuM4135超短传播延迟对实现有效的快速过流保护非常重要。图6显示了硬件跳 变信号、PWM输出信号和其中一个逆变器臂的上方IGBT实际栅 极-发射极波形之间的延迟。图中可以看到,IGBT开始关断后的 总延迟约为100 ns。
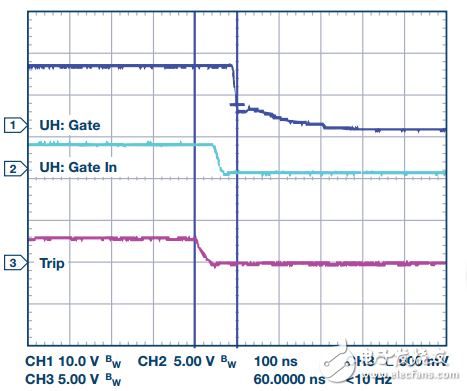
图6. 过流关断时序延迟(通道1:栅极-发射极电压10 V/div;通道2:来自 控制器的PWM信号5 V/div;通道3:低电平有效跳变信号5 V/div;100 ns/div)
栅极驱动器去饱和检测比上文描述的过流检测方法执行速度快 得多,且对于限制短路电流所允许上升的上限很重要,从而提 升了系统的整体稳定性,并超过了可以实现的水准,哪怕系统 带有快速过流保护功能。这显示在图7中。当发生故障时,电 流快速上升——事实上,电流远高于图中所示,因为图中以带 宽限制20 A电流探针进行测量,仅供参考。去饱和电压达到9 V 跳变电平,栅极驱动器开始关断。显然,短路的整个持续时间 不足400 ns。电流的长尾表示下方IGBT反并联二极管中的续流导 致的感应电能。开启时,去饱和电压的初始增加是杂散去饱和 检测电动势的一个例子,这是由于集电极-发射极电压瞬态所导 致。可以通过增加去饱和滤波器时间常数,从而增加额外的消 隐时间而消除。

图7. IGBT短路检测

图8. IGBT短路关断
图8显示了IGBT上的集电极-发射极电压。由于去饱和保护期 间,关断的阻抗较大,因此初始受控过冲约为320 VDC总线电压 以上80 V。电流在下游反并联二极管中流动,而电路寄生实际上 使得电压过冲略高,最高约为420 V。

图9. 开启时的米勒箝位 通道1:栅极-发射极电压5 V/div;通道2:来自控 制器的PWM信号5 V/div;通道3:集电极-发射极电压100 V/div;200 ns/div
图9显示了正常工作时,米勒箝位防止逆变器直通的价值。
小结
随着IGBT的短路耐受时间下降至1 μs的水平,在极短的时间内检 测并关断过流和短路正变得越来越重要。工业电机驱动的可靠 性与IGBT保护电路有很大的关系。本文罗列了一些处理这个问 题的方法,并提供了实验结果,强调了稳定隔离式栅极驱动器 IC (比如ADI公司的ADuM4135)的价值。
- 具短路保护和停机功能的负电压降压转换器(12-22)
- 什么是短路保护?什么是过载保护?短路保护与过载保护的区别是什么?(06-24)
- 短路保护电子电路图(08-18)
- 什么是短路保护?详细解析短路保护的工作原理(04-22)
- 家电智能功率模块单驱动电源方案(10-07)
- IGBT 驱动器提供可靠保护(04-14)