工业电机驱动IGBT过流和短路保护的问题及处理方法
跳变。选择这些滤波器元件时,需在噪声抗扰度和IGBT短 路耐受时间内作出反应这两者之间进行权衡。
检测到IGBT过流后,进一步的挑战便是关闭处于不正常高电流 电平状态的IGBT。正常工作条件下,栅极驱动器设计为能够尽 可能快速地关闭IGBT,以便最大程度降低开关损耗。这是通过 较低的驱动器阻抗和栅极驱动电阻来实现的。如果针对过流条 件施加同样的栅极关断速率,则集电极-发射极的di/dt将会大很 多,因为在较短的时间内电流变化较大。由于线焊和PCB走线 杂散电感导致的集电极-发射极电路寄生电感可能会使较大的过 压电平瞬间到达IGBT(因为VLSTRAY = LSTRAY &TImes; di/dt)。因此,在去饱 和事件发生期间,关断IGBT时,提供阻抗较高的关断路径很重 要,这样可以降低di/dt以及一切具有潜在破坏性的过压电平。
除了系统故障导致的短路,瞬时逆变器直通同样会发生在正常 工作条件下。此时,IGBT导通要求IGBT驱动至饱和区域,在该区域中导通损耗最低。这通常意味着导通状态时的栅极-发射极电 压大于12 V。IGBT关断要求IGBT驱动至工作截止区域,以便在高 端IGBT导通时成功阻隔两端的反向高电压。原则上讲,可以通 过使IGBT栅极-发射极电压下降至0 V实现该目标。但是,必须考 虑逆变器臂上低端晶体管导通时的副作用。导通时开关节点电 压的快速变化导致容性感应电流流过低端IGBT寄生密勒栅极-集 电极电容(图3中的CGC)。该电流流过低端栅极驱动器(图3中的 ZDRIVER)关断阻抗,在低端IGBT栅极发射极端创造出一个瞬变电压 增加,如图所示。如果该电压上升至IGBT阈值电压VTH以上,则 会导致低端IGBT的短暂导通,从而形成瞬态逆变器臂直通—— 因为两个IGBT都短暂导通。这一般不会破坏IGBT,但却能增加功 耗,影响可靠性。
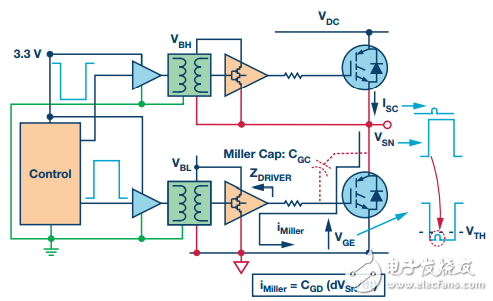
图3. 密勒感应逆变器直通
一般而言,有两种方法可以解决逆变器IGBT的感应导通问 题——使用双极性电源和/或额外的米勒箝位。在栅极驱动器 隔离端接受双极性电源的能力为感应电压瞬变提供了额外的裕 量。例如,–7.5 V负电源轨表示需要大于8.5 V的感应电压瞬变才 能感应杂散导通。 这足以防止杂散导通。另一种方法是在完成 关断转换后的一段时间内降低栅极驱动器电路的关断阻抗。这 称为米勒箝位电路。容性电流现在流经较低阻抗的电路,随后 降低电压瞬变的幅度。针对导通与关断采用非对称栅极电阻, 便可为开关速率控制提供额外的灵活性。所有这些栅极驱动器 功能都对整个系统的可靠性与效率有正面影响。
实验示例
实验设置采用三相逆变器,该逆变器由交流市电通过半波整流器供电。虽然系统最高可采用800 V的直流总线电压,但本例中 的直流总线电压为320 V。正常工作时,0.5 HP感应电机由开环 V/Hz控制驱动。IGBT采用InternaTIonal RecTIfier提供的1200 V、30 A IRG7PH46UDPBF。控制器采用ADI的ADSP-CM408F Cortex®-M4F混合 信号处理器。使用隔离式Σ-Δ AD7403调制器进行相位电流测量, 使用ADuM4135实现隔离式栅极驱动(它是一款磁性隔离式栅极驱 动器产品,集成去饱和检测、米勒箝位和其它IGBT保护功能)。 在电机相位之间,或在电机相位和负直流总线之间手动开关短 路,进行短路测试。 本例中未测试短路至地。
控制器和电源板如图5所示。它们均为ADI公司的ADSP-CM408F EZ-kit®6 和EV-MCS-ISOINVEP-Z隔离式逆变器平台。
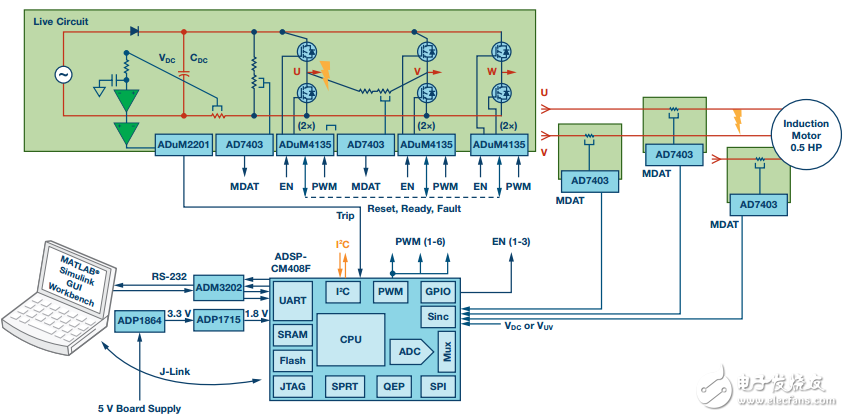
图4. 实验设置

图5. ADI隔离式逆变器平台搭配全功能IGBT栅极驱动器
实验硬件中,通过多种方法实现IGBT过流和短路保护。它们分 别是: 直流总线电流检测(逆变器直通故障) ;电机相位电流检测(电机绕组故障) ; 栅极驱动器去饱和检测(所有故障)。
对于直流总线电流检测电路,必须加一个小型滤波器,避免误 触发,因为直流总线电流由于潜在的高噪声电流而断续。采用 具有3 μs时间常数的RC滤波器。检测到过流后,其余有关IGBT关 断的延迟是通过运算放大器、比较器、信号隔离器、ADSP-CM408F 中的跳变响应时间,以及栅极驱动器传播延迟。这会额外增 加0.4 μs,使得故障至关断的总时间延迟为3.4 μs——远低于很 多IGBT的短路时间常数。类似的时序同样适用于采用AD7403以 及ADSP-CM408F处理器上集成式过载检测sinc滤波器的电机相位 电流检测。采用时间常数为3 μs左右的sinc滤波器可良好运作。8 在这种情况下,其余系统延迟的原因仅会是跳变信号内部路由 至PWM单元以及存在栅极驱动器传播延迟,因为过载sinc滤波器 是处
- 具短路保护和停机功能的负电压降压转换器(12-22)
- 什么是短路保护?什么是过载保护?短路保护与过载保护的区别是什么?(06-24)
- 短路保护电子电路图(08-18)
- 什么是短路保护?详细解析短路保护的工作原理(04-22)
- 家电智能功率模块单驱动电源方案(10-07)
- IGBT 驱动器提供可靠保护(04-14)