一种实用的机器人控制器力/位混合控制技术
M变量对ACC一34AA输入端和输出端进行只读和只写。
4 开放式特种机器人的力/位混合控制
4.1力控制的必要性
为使机器人在约束环境中具有灵活性,同时避免与环境接触时产生过大的接触力或力矩,这就要求机器人终端具备同时控制其终端位置和力的能力。本系统中,机器人操作手要在工作空间狭小的回转壳体内完成预定的接触性作业,此项作业要求执行机构要在壳体内壁上定位精确,同时能够在不规则的回转壳体内壁表面上不同区域始终保持接触,且接触力的大小恒定或按规定输出。因此,本文在位置伺服系统的基础上考虑力控制,以使操作手获得对未知环境的柔顺性。
4.2 基于PMAC力/位混合控制的硬件实现
为了实现机器人末端的力/位混合控制,需要PMAc的模拟输出分别工作在伺服驱动器的速度和转矩控制模式下,见图6所示。
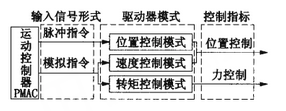
图6伺服驱动器输出模式
驱动器的速度模式和力矩模式都接受上位控制器(PMAC)的模拟信号。其中,速度模式的是以控制位置为主要控制指标,而力矩模式是以控制转矩为主要控制指标,在力矩模式下可以在额定转矩范匿内实现恒转矩输出。
为了实现以上要求,操作手的接触作业分三个步骤:首先操作手在速度模式下到达预定的位置并保持一定的姿态,在这种模式下利用电流环的位置控制更准确;随后,对伺服电机进行模式转换,小臂在力矩模式下竖直抬起,在执行机构接近壳体时,执行机构的电机处于自由状态以保证能良好的依附于壳体内壁;最后,在末端机构与壳体内壁接触时,壳体转动,依靠反馈信息调节小臂伺服电机的转矩使执行器能够始终与壳体保持接触并控制一定的接触力,从而使机器人能够在非结构表面下进行有效的力控制,完成接触性作业。
本系统中PMAC运动控制器共控制四轴联动,但由于操作手中大臂、小臂、执行机构要分别工作于两种不同模式下,所以实际占用PMAC的轴通道数为7个。在这两种模式下,驱动器侧接受控制器指令的输入引脚不同,以松下驱动器为例,速度模式下用14、15引脚,而在力矩模式下用16、17引脚。本系统中PMAC与驱动器模式转换的双通道连接见图7。
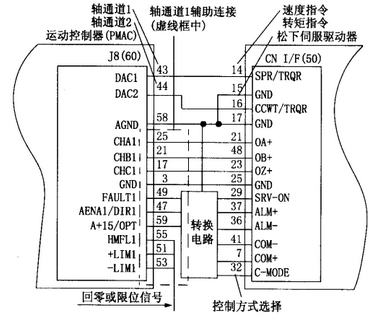
图7双轴通道伺服输出连接图
图7所示两个轴通道DACl一DAC2(PMAC的43、44)模拟输出分别接到伺服驱动器的速度和转矩指令引脚(驱动器侧的14、16)。轴通道1(DACl)的辅助连接是指与其有关的反馈、驱动器使能和报错、限位等连接。,如,CHAl一CHCl是通道1的编码盘反馈信号,+LIMI和一LIMl是在反方向和正方向的限位信号,AENAI/D1RI是放大器使能信号,决定伺服驱动器的使能,其它类似引脚不在详述。、PMAC的J8有60个引脚,有四个轴输出{通道,每个轴输出通道都有一套类似的辅助连接,每个轴输出通道根据其相应的辅助连接而凋节模拟输出,完成伺服功能。在驱动器一侧,要实现两种模式,需要轴输出通道的模拟指令信号在14和16之间切换,如果用一个轴输出通道,需要在PMAC和驱动器之间自己搭建电路在外部来完成此切换,这样做实时性不好,可靠性也不高。,因此本系统采用PMAC的两个轴通道来实现埘驱动器两种模式的伺服输出,这样做可以不必搭建外部电路,而11保证实时性的要求。具体做法是通过PMAC的J5 1来改变C—MODE的状态。如果单独控制两个轴通道时,需要两套辅助连接以保证轴通道的伺服输出,但实际上一个驱动器及外部开关只能提供一套轴通道辅助连接,这需要PMAC在其内部完成输出的切换,通过设置I变量中的IX0217 J,这种切换保证在只有一套轴辅助连接的前提下,PMAC对两个轴通道伺服输出。
4.3 基于PMAC力/位控制的软件实现
整个控制软件包括实时控制软件与上位机的系统管理软件两部分。实时控制软件包括伺服驱动、PLC监控、数据采集等;系统管理软件包括初始化、参数输入、双CPU通讯、壳体作业规划等。为了在PMA(:中实现操作手的力/位混合控制,控制软件在Windows平台L用VC++6.0编写系统应用程序,同时调用PMAC中PCOMM32PRO动态连接库中的函数完成对PMAC的实时操作。、
在PMAC的初始化程序中作以下设置和定义:
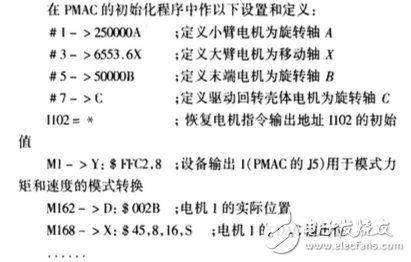
其中,Pl为壳体入口处位置的横坐标,P2为壳体作业位置的横坐标,P3为壳体作业位置的纵坐标,P】00为力矩设置值。/102为电机指令输出地址,1169为小臂电机DAC输出限制,c为标定小臂角度极限。M162为寄存器中存储小臂电机(电机1)实际位置值。M168为输出力矩对DAC的标定值。
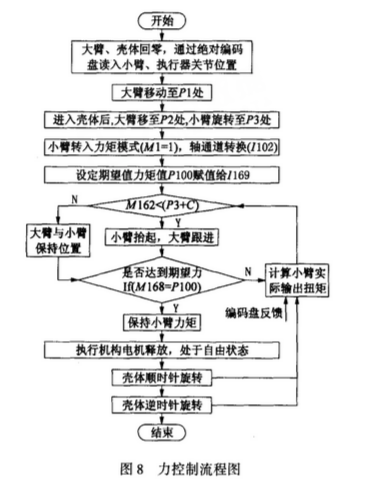
控制流程如图8所示。
5 结论
本文针对要完成接触性作业的特种机器人,研究了一个实用的开放式的机器人控制器。应用IPC和PMAC双CPU的开放式结构,
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)