详解Oculus Rift的主动式光学定位技术
的对应关系后,总结出DK2判断强弱变化的依据是:
1) 如果当前帧的斑点比上一帧斑点大10%,就是0;
2) 如果当前帧的斑点比上一帧斑点小10%,就是1;
3) 否则忽略。
这样的设计非常好,防止了LED灯受到随机干扰。
不过在实际验证中,发现如果这样提取图像,在头显运动时,还是会有错误出现(比如漏拍了几帧), 那么它是如何判别的呢?这个花了我不少时间去想,最后发现这和汉明距离有关系。
所谓汉明距离,简单地说:如果数字是相同的,它们的汉明距离为0,如果他们在单一的比特不同,它们的距离为1,如果10比特它们彼此逐位否定,它们的汉明距离是10。我发现,DK2已经默认每个拍摄后的图像(提取40个LED灯表示的比特位)和前一帧最多的汉明距离是 3,如果大于这个数字,则认为是错误帧。
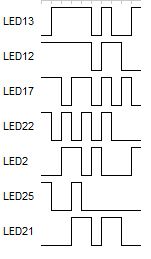
最后,给出几个比较有特点的LED的10帧图,大家可以看一下:
| 感知姿态
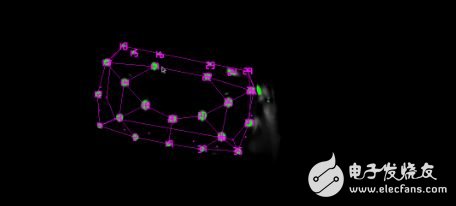
前面谈了如何探测LED灯,我介绍了DK2的摄像机通过视频流捕获LED灯独特的闪烁模式,拼出10位二进制数来识别ID。
现在来谈如何感知姿态,你可能会很自然地想到,通过每10帧来识别LED,然后利用已知LED的位置来判断姿态。说实话,这个方法也可以,但是这就表示要间隔10个帧才能识别一次姿态,万一动作快一点,就出现麻烦了。
当然,要估计一个三维模型的姿态,需要足够的LED的信息,如果拍摄到的LED点不够,就必须使用DK2中的IMU来进行姿态的感知。另外,IMU本身也会累计误差。
DK2的算法其实是这样的:
1) 初始状态,先读取静止状态的头显,10帧的时间,识别每个LED的ID号;
2) 不断地拍摄,利用前面帧的信息,推测出现在的LED灯的位置;
3) 如果出现错误,就重新通过10帧的时间识别LED;
4) 如果有足够的LED灯信息,就使用识别算法;
5) 如果没有足够的LED灯的信息,就使用IMU识别姿态;
三维姿态估计或已知物体相对于2D照相机的角度,求出该物体在相机坐标系的坐标值,称为PNP问题。在Oculus Rift中,感知头显的姿态是利用PnP算法,融合IMU实现的。Oculus Rift没有单纯的采用IMU进行姿态解算是因为IMU本身会产生漂移,无法在长时间内跟踪对象的绝对位置,因此必须外接3D参照系,PnP正可以提供这样一个参照系。说白了,就是要利用PnP来纠正IMU,最后融合成一组比较合理的姿态信息。
那么,什么是PnP算法?
3D姿态估计是一个多维非线性优化问题,摄像机拍摄图像中的一组2D点,例如提取的LED斑点的集合,可以尝试重建相对于相机的坐标模型的未知位置(X,Y,Z)和方向(偏航,俯仰,滚动)。
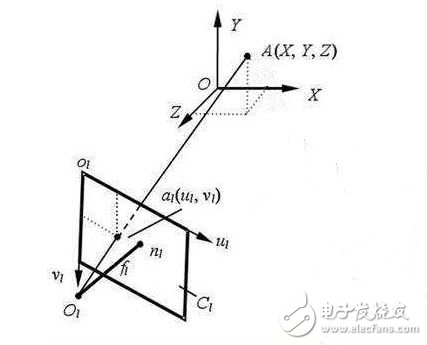
说详细一点,在相机内参数巳知的情况,由特征点与其像点的对应关系求解目标相对于相机的位姿,就是经典的PnP 问题,这些算法大致可分为迭代算法和非迭代算法两类。
非迭代算法采用代数方法直接求出相对位姿,针对P3P 、P4P等问题推导出多种解析算法,该类算法具有运算量小、计算速度快等优点,但受误差影响大且精度不高。Lepetit 提出的一种计算量为O(n)的PnP问题非迭代算法,只需要4个点的信息就可以求解目标相对于相机的姿态信息, Oculus Rift正是利用这种算法实现的。
最后再向大家总结说明一下感知姿态的基本步骤:
1、发出同步信号,等待LED灯亮起后,提取收到的8位灰度视频帧明亮的斑点。
2、创造一种斑点颜色为亮绿色的8位RGB输出视频帧(用于调试/可视化的目的)。
3、匹配大致圆盘形的斑点,并与来自先前帧中的斑点进行比较,比较它们的尺寸差异到差分位解码器中,累积其10位ID和LED关联。排序所有提取或投射二维LED的位置到一个kd树,用在下一帧中快速匹配。
4、如果有四个或更多的识别斑点且没有当前姿势估计,运行从头计算姿态估计方法。
5、如果有四个或多个识别的斑点,且已经识别了先前帧的姿态,采用迭代姿态估计方法。
6、用姿态信息纠正IMU的漂移,并融合IMU的姿态信息。
以上介绍了Oculus Rift的实现过程。
Oculus Rift的主动式红外光学+IMU定位系统精度较高,抗遮挡性强。
由于其所用的摄像机具备很高的拍摄速率,并且该类系统总是能够得到标记点在当前空间的绝对位置坐标,所以不存在累积误差。但是由于摄像头视角有限,因此该产品的可用范围有限,会在很大程度上限制使用者的适用范围,因而无法使用Oculus Rift来玩需要走动等大范围活动的虚拟现实游戏。也因此,虽然Oculus Rift可以支持多个目标物同时定位,但是目标物不可过多,一般不超过两个。
- 盘点VR输入设备领域有代表性的产品及技术原理(11-21)
- 揭秘VR头盔工作原理,原来是这样工作的(09-19)
- 揭秘!游戏设计师如何巧妙地规避VR晕动症(09-19)
- VR内向外和外向内定位追踪的原理与发展趋势详解(07-04)