浅谈汽车ISO 26262安全标准架构及分解
汽车上电子/电气系统数量不断的增加,一些高端豪华轿车上有多达70多个ECU(Electronic Control Unit电子控制单元),其中安全气囊系统、制动系统、底盘控制系统、发动机控制系统以及线控系统等都是安全相关系统。当系统出现故障的时候,系统必须转入安全状态或者转换到降级模式,避免系统功能失效而导致人员伤亡。失效可能是由于规范错误人为原因的错误、环境的影响等等原因引起的。为了实现汽车上电子/电气系统的功能安全设计,道路车辆功能安全标准 ISO 26262于2011年正式发布,为开发汽车安全相关系统提供了指南,该标准的基础是适用于任何行业的电子/电气/可编程电子系统的功能安全标准IEC 61508。

ISO 26262标准中对系统做功能安全设计时,前期重要的一个步骤是对系统进行危害分析和风险评估,识别出系统的危害并且对危害的风险等级——ASIL等级(Automotive Safety Integration Level,汽车安全完整性等级)进行评估。ASIL有四个等级,分别为A,B,C,D,其中A是最低的等级,D是最高的等级。然后,针对每种危害确定至少一个安全目标,安全目标是系统的最高级别的安全需求,由安全目标导出系统级别的安全需求,再将安全需求分配到硬件和软件。ASIL等级决定了对系统安全性的要求,ASIL等级越高,对系统的安全性要求越高,为实现安全付出的代价越高,意味着硬件的诊断覆盖率越高,开发流程越严格,相应的开发成本增加、开发周期延长,技术要求严格。ISO 26262中提出了在满足安全目标的前提下降低ASIL等级的方法——ASIL分解,这样可以解决上述开发中的难点。
本文首先介绍了ISO 26262标准中的危害分析和风险评估阶段中的ASIL等级确定方法,然后介绍了ASIL分解的原则,并辅以实例进行说明。
2. 危害分析和风险评估
依据ISO 26262标准进行功能安全设计时,首先识别系统的功能,并分析其所有可能的功能故障(Malfunction),可采用的分析方法有HAZOP,FMEA、头脑风暴等。如果在系统开发的各个阶段发现在本阶段没有识别出来的故障,都要回到这个阶段,进行更新。功能故障在特定的驾驶场景下,才会造成伤亡事件,比如近光灯系统,其中一个功能故障就是灯非预期熄灭,如果在漆黑的夜晚行驶在山路上,驾驶员看不清道路状况,可能会掉入悬崖,造成车毁人亡;如果此功能故障发生在白天就不会产生任何的影响。所以进行功能故障分析后,要进行情景分析,识别与此故障相关的驾驶情景,比如:高速公路超车、车库停车等。分析驾驶情景建议从公路类型:比如国道、城市道路、乡村道路等;路面情况:比如湿滑路面、冰雪路面、干燥路面;车辆状态:比如转向、 超车、制动、加速等;环境条件:比如:风雪交加、夜晚、隧道灯;交通状况:拥堵、顺畅、红绿灯等;人员情况:不如乘客、路人等几个方面去考虑。功能故障和驾驶场景的组合叫做危害事件(hazard event), 危害事件确定后,根据三个因子——严重度(Severity)、暴露率(Exposure)和可控性(Controllability)评估危害事件的风险级别——ASIL等级。其中严重度是指对驾驶员、乘员、或者行人等涉险人员的伤害程度;暴露率是指人员暴露在系统的失效能够造成危害的场景中的概率;可控性是指驾驶员或其他涉险人员能够避免事故或伤害的可能性。这三个因子的分类在表1中给出。
ASIL等级的确定基于这三个影响因子,表2中给出了ASIL的确定方法,其中D代表最高等级, A代表最低等级,QM表示质量管理(Quality Management),表示按照质量管理体系开发系统或功能就足够了,不用考虑任何安全相关的设计。确定了危害的ASIL等级后,为每个危害确定至少一个安全目标,作为功能和技术安全需求的基础。
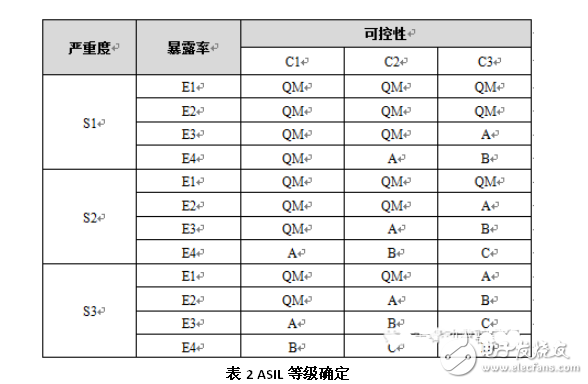
表2 ASIL等级确定
下面以EPB(Electrical Park Brake)系统为例介绍如何进行危害分析和风险评估。
EPB较传统的驻车制动器,除了驻车功能,还有动态起步辅助功能、紧急制动功能以及自动驻车功能等。这里我们以驻车功能为例,当驻车时,驾驶员通过按钮或其它方式发出制动请求,EPB系统在汽车的后轮上施加制动力,以防止车非预期滑行。该系统的危害有:非预期制动失效、非预期制动启动。相同的危害在不同的场景下的风险是不一样的,所以我们要对不同的驾驶场景进行分析。为了简化问题,这里我们仅对"非预期制动失效"这种功能故障进行风险评估。表3给出了EPB风险评估表,在该表中我们考虑的驾驶场景是车停在斜坡上,驾驶员不在车上。如果驾驶员在车上的话,驾驶员可通过踩刹
- 用节省燃料的启动/停止系统为汽车电子产品供电(08-17)
- 新型汽车设计需要降压-升压型转换器(07-02)
- 汽车电子极近场EMI扫描技术方案 (01-20)
- 最大限度地减小在汽车环境中的EMI(02-14)
- 看半导体公司如何助力车联网技术(07-22)
- 汽车电源的监视和开关(12-19)