汽车电子域控制器一些问题以及探讨
昨天晚上开群小的技术研讨会,整个微信群交流还是要轻松些,向各位工程师朋友道歉,有时候过于严肃了。简单聊聊吧。沈工抛的问题太多了,主要包括:
一、EE架构
未来2020年的EE架构的变化有哪些点?
通信速度大于1G?
分布式变为集成式还是不同域按需设计?
哪些新技术发展导致了EE架构的这些变化?
Domain ECU是否是未来EE架构中必须的产品?
二、Domain ECU
Domain ECU的在EE架构中的作用和使命是什么?
OEM对Domain ECU的期望是什么?
Domain 分类和理由
单个Domain ECU的架构,Master ECU和Slave ECU的方式?
Sensor&actuator 信息互通方式?
不同域的Domain ECU技术共同点是哪些,不同点又是哪些?
站在OEM角度看,考虑哪些因素影响决策Domain ECU的产品应用,哪些又会限制其产品应用?
法规或标准?
智能化零部件趋势?
通信技术发展?
ADAS和energy control,vehicle motion 这些Domain ECU的信息接口有哪些?
Ethernet在Domain ECU的地位,必要性和引入时间?
我们大概达成了这样的一些共识:
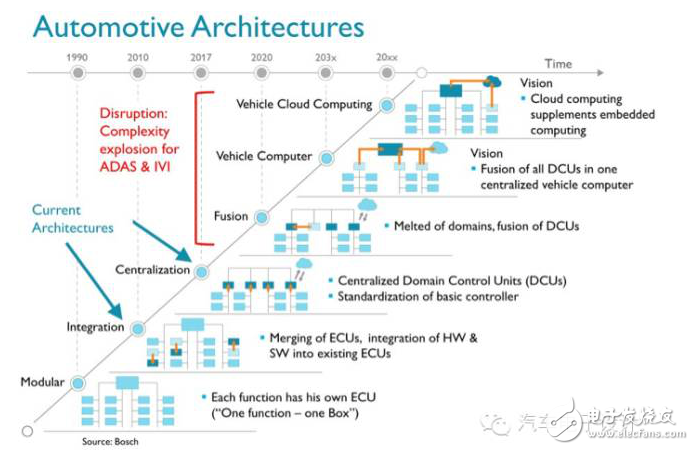
1)本土自主OEM需要去改变,从EE电子架构来看是分步骤的
目前大部分的OEM的车型处在网关的阶段,也就是说,还没有试图把原来的车型进入整合阶段,可能由于供应商的原因,把一些功能已经开始整合,但是从架构上来看,这里更多的是被动的。
将功能整合,加大了供应商的能力门槛,也就进一步往能力强的Tie1倾斜,这事干出来其实是给自己添堵
大的Tie1其实更多的还是把通用型的产品拿过来,为本土自主OEM更改架构和功能定义的少之甚少
开发费、产品成本只有劣势
由于车型平台化乃至模块化的实践,特别是多地全球同步投放和开发这些没有的话,这种域控分级演化就是成本
基本结论从一开始就推不下去,2020年停滞
其实本身哪怕是一小步就意味着太多的东西在里面了

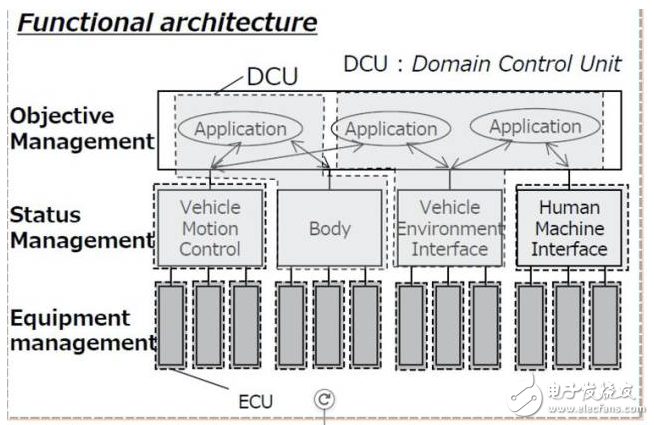
从功能分解到下面的通信层和ECU功能实现层,从第一步到最后一步,都是说起来容易做起来难的
域控制器的核心发展,还是芯片的计算能力的快速提升,部分Tie1和OEM希望属于公用信息的系统组件,能在软件中分配和执行,这样以足够的资源快速的完成客户需求的功能,也就是让软件和硬件的设计分离。
底下的子ECU剩下执行驱动和特殊逻辑策略,
诊断信息和状态数据
传感器智能化接口
执行器接口
最终实现干路domain控制器服用,其他配置不同的模块化小的东西。

有一些值得列举的东西
MCU+VCU+BMS+充电控制+配电管理 的新能源动力系统域由于本身新能源是完全新的,这块你怎么干都行,把功能进行分配,由于牵涉的东西大量只涉及电子电气
新能源域不涉及太多的外国供应商
新能源域原有的CAN架构系统本来就不完善,加大了功能域的融合
ADAS这块有着更多的可能性
不同的功能整合,需要让多个ADAS的功能直接合并在一个控制器内
ADAS的数据量要求,直接快让LVDS和以太网PK了
原来传统车那块
形成轻度的域控制,功能进行一定程度组合,让主要供应商能hold住
车企在研究院和工程实施出现一些大的分离,也可能出现跨越性部署,上一些骡子车可能性大一些
在ADAS的推动作用下还是会有变化
小结:
1)是我太苛刻和求全责备了,我希望下一次能更好的理解大家的需求,在轻松和愉快的气氛里面,把讨论和交流变成成长性而不是耗散性。快了会伤到自己的。
2)整个EE电子的快速演讲,确实国内外会分开发展,这块消费者看不到,所以国内自主品牌车企在这一波的残酷竞争中,还是会分化但是不会特别快
3)不管如何,这次从知识上和设计上都是有收获的,网络化学习,你不能要求特别高,但是横竖都达到了讨论和交流的目的,感谢参与讨论的群友
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)