nRF5182嵌入式系统智能手环设计
式显示手环的数据信息:时间、步数、卡路里消耗等。
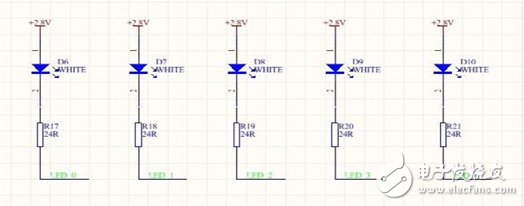
图6 LED灯控制电路
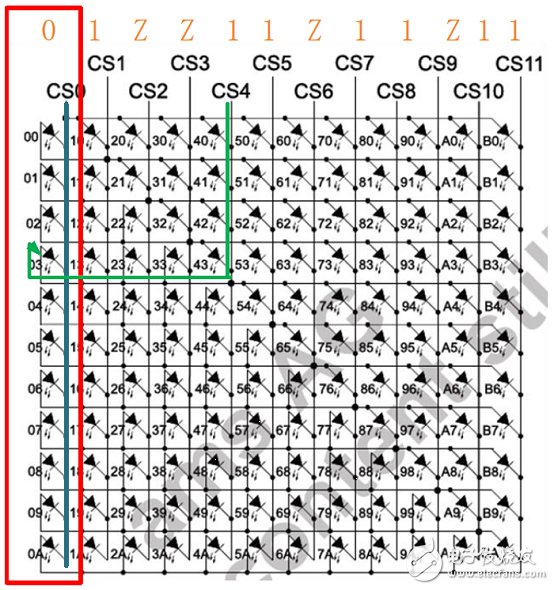
图7 LED点阵列控制模块电路
5.普通马达模块
因为马达的导通电流可能高达100mA,不能通过GPIO直接供电控制(驱动电流不够),所以使用一个MOS管作为功率放大电路。串联的24欧姆电阻用来调节马达震动强度,减少功耗。在0欧姆时,马达的启动电流为100mA左右,目前配置的实测电流为36mA。
MOS管输入端的下拉电阻是保证在重启瞬间马达保持静止,因为芯片上电后引脚为高电平,MOS处于导通状态,从而使马达存在短暂的震动。
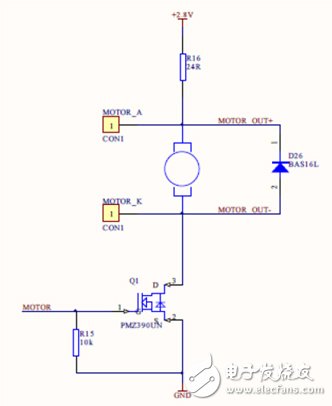
图8 普通马达模块控制电路
6.线性马达控制模块
线性马达控制复杂,需要用专用的芯片完成(设计中采用了DRV2605驱动芯片)。芯片与MCU通过I2C总线通信。线性马达的功能由驱动芯片控制,驱动芯片本身的输入电压范围是2.5V-5.5V。
给驱动芯片的供电电压,设计中使用的是电池供电,而不是DCDC输出的系统电压。
理由是:驱动芯片的工作电压是使用内部的DCDC完成电压转换。假设DCDC转换效率均为90%,那么使用电池供电,能量效率为90%;使用系统电压供电,效率为90%*90%=81%。
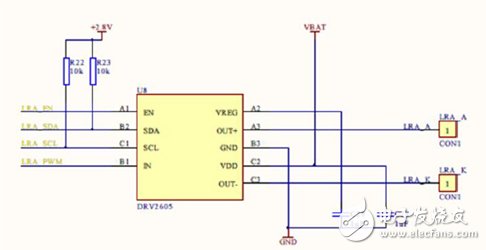
图9 线性马达控制电路
7.电量检测模块
电池的电量和电压有对应关系,系统只要检测到电池电压,即可映像成电池剩余电量。
电池电压在0-4.2V之间变化,经过四分之一的分压电路,输出电压会在0-1.05V之间变化。充分利用了nRF51822的ADC量程0-1.2V,并联的电阻用于稳定电压值。
电路如下:
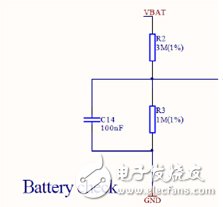
图10 电量检测模块电路
8.外部复位模块
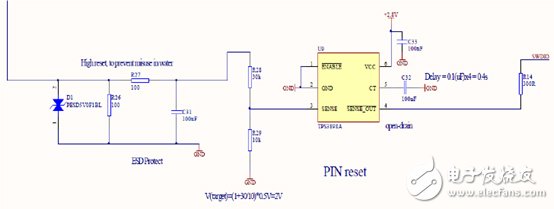
图11 外部复位模块电路
9.充电电路模块
充电芯片采用了TI的BQ24040,选取该款型号的目的是,能够向MCU提供是否正在充电(CHG_STATE)和是否插入充电器(PG_STATE)的信息(大多数充电IC不提供后者信息)。充电电流可控,预充电与快速电流比例可控。
目前的参考方案按照18mAh的电池,预充电电流为快速充电电流的40%设计。
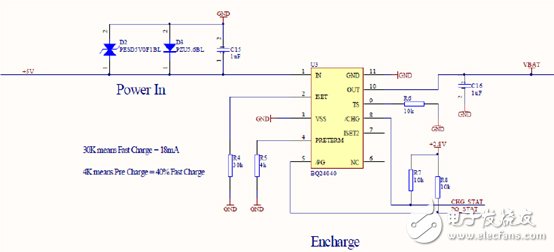
图12 充电电路模块电路
10.系统电源模块
为了保证足够的电源效率,设计使用了高效率,带轻载优化的DCDC芯片TPS62260,而不是传统的LDO。因为nRF51822内部有LDO,为了提高效率,系统电压应该越低越好,而马达的正常工作电压是3V,白色LED最低工作电压是2.8V,其他IC的最低系统电压是1.8V。因此最终确定的系统电压是2.8V。
电源芯片的选择:
l 传统LDO的静态功耗有优势,但是输入-输出压差越大,效率越低。电池电压如果是3.9V,输出电压为2.8V,效率为2.8/3.9=71%;
l DCDC静态电流大,但是输入电流在1mA以上时,效率能够达到90%以上;
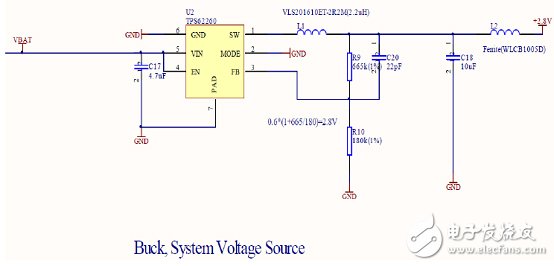
图13 系统电源模块电路
11.调试接口
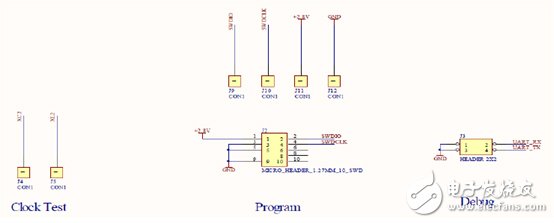
图14 调试接口电路
12.射频电路
器件之间尽量近,减短走线(1mm走线相当于1nH电感;更长的线会增加对地电容)
不要用过孔(过孔相当于电感)
匹配电路周围要被GND包裹以减小对地电容
匹配网络的下方不要走线或者放置器件,造成匹配网络和参考地之间的一个"黑洞"
建议板厚不超过1.6mm,否则射频性能会下降
大功率和噪声源信号走线要与射频线垂直
LED相比射频是大功率信号,如果不是外观设计要求,强烈建议不要像该PCB方案把LED放置在天线附近(虽然PCB中LED走线已经尽量垂直于天线)
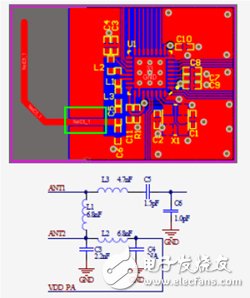
图15 PCB正确走线和等效电路
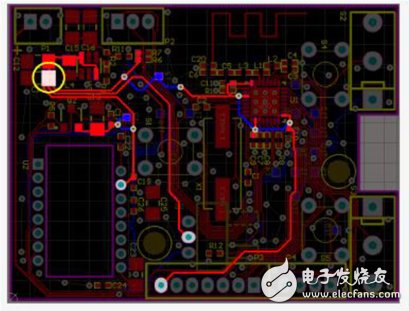
图16 智能手环PCB外形图
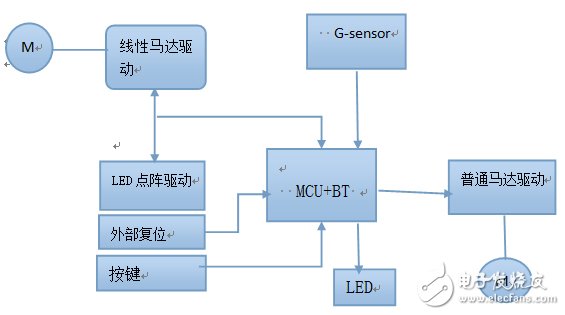
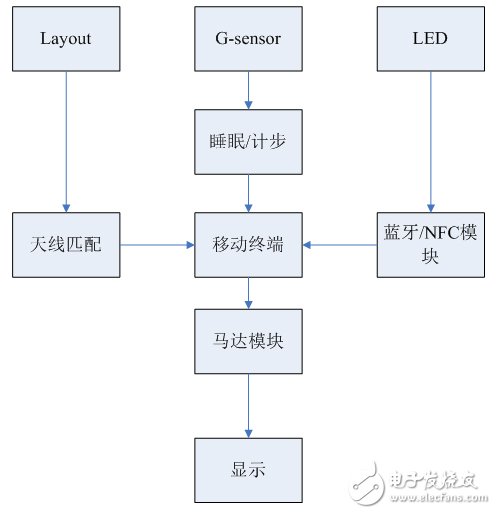
图四智能手环结构图
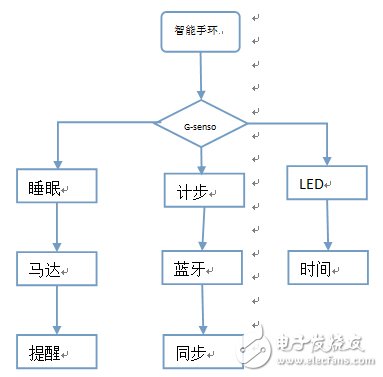
智能手环功能实现流程图
图八主程序结构流图
- 主流蓝牙BLE控制芯片详解(4):Nordic nRF51822(07-20)
- 智能手环幕后的英雄(02-26)
- 脑洞无限!VR控制器竟然还可以这样设计(02-20)
- 这才是可穿戴!TüV莱茵智能手环评估方案(11-16)
- 智能手环五大主流MEMS传感器盘点(02-19)
- 智能手环的PCB板设计注意事项(07-25)