汽车AFS的电机驱动方案及应用设计要点
近年来,汽车中的电子成分不断提升,帮助提升燃油经济性,减少排放,增强安全、照明、车载网络及信息娱乐系统等。其中,汽车前照灯是安全驾驶的一个重要环节,安森美半导体创新及领先行业的汽车自适应前照灯系统(Adaptive Front-lighting System, AFS)电机驱动方案克服传统前照灯的局限,帮助提升行车安全性。本文分析AFS的特性,介绍安森美半导体的AFS方案,以及应用设计要点,帮助客户应用汽车AFS方案。
自适应前照灯系统(AFS)的应用优势及工作原理
传统汽车前照灯的灯光跟车身方向始终一致,在汽车转弯时无法有效照明弯道内侧的盲区,如果弯道内侧恰好存在人或物体,而车速又未恰当降低,则会带来安全隐患,如图1所示。相比较而言,AFS功能可以提供旋转(swiveling)调节效果,能够根据方向盘的角度转动,把有效的光束投射到驾驶者需要看清的前方路面上,帮助降低安全隐患。

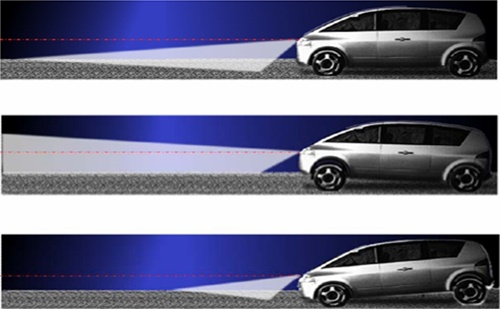
图1:AFS功能的旋转调节(左图)及水平调节(右图)照明效果
除了能够进行动态旋转调节,AFS功能还能提供动态水平高度调节。此功能根据负载轴传感器的信号来调节前照灯的水平高度,可以适应不同的负载及不同的斜坡环境。如图1右侧中,上图是AFS功能在正常水平条件下的灯光投身效果,中图是在汽车启动或上坡时路面颠簸条件下灯光上扬效果,下图是在刹车或下坡条件下的灯光水平下沉照明效果。可见AFS可根据车身水平倾斜情况动态调节灯光高度,改善照明效果,增强安全性。AFS工作原理结构图分别如图2和图3所示。
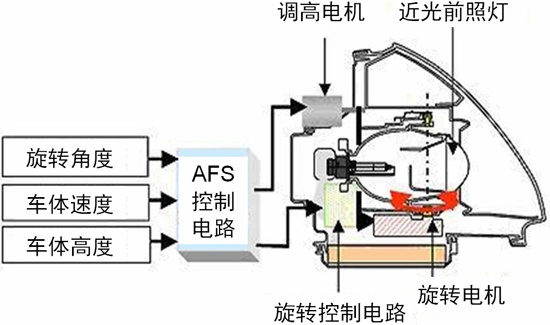
图2:AFS的工作原理结构图
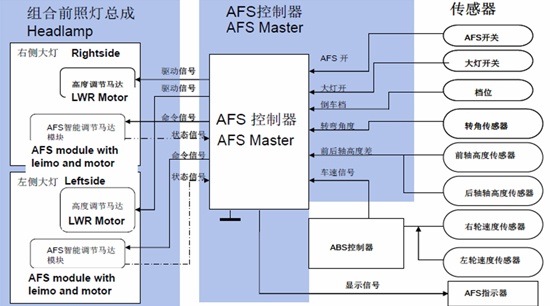
图3:AFS的工作原理结构图(续)
步进电机驱动器的安放位置选择
汽车AFS的旋转及水平高度调节,是各使用一个步进电机来实现的,电机根据车辆四周的众多传感器反馈的数据作出反应,故设计人员需要采用适合的步进电机驱动方案,且安放在适合的位置。
控制AFS功能的步进电机驱动器的安放位置有两种选择。一种方法称为直接驱动,典型产品如NCV70522。这种方案中,步进电机驱动芯片安装在跟主微控制器(MCU)同一印制电路板(PCB)上。此电路板离前照灯部件及相关步进电机较远,而每个电机需要与对应的信号连接。
另一种方法是机电一体化,典型产品如AMIS-30623。在这种方法中,步进电机驱动IC能够直接安装在步进电机结构内,仅需共享地线与LIN总线信号连接。这种方法极为有益,因为MCU与机电一体化模块的接口连接只需要低电磁兼容性的总线。机电一体化方法采用模块化设计,前照灯组件的维修保养方便,好处明显。这两种方法的结构示意图如图4所示。
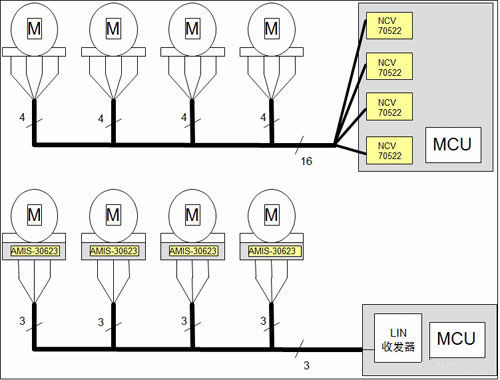
图4:两种不同的步进电机驱动器安放方法
安森美半导体主要AFS步进电机驱动器产品及关键特性
安森美半导体提供多种多样的步进电机驱动器产品,如AMIS-30621、AMIS-30623、NCV70627、NCV70521及 NCV70522等。这些产品中, AMIS-30621、AMIS-30623及NCV70627采用LIN通信,而NCV70521及 NCV70522采用SPI通信。其中,AMIS-30623是一款单芯片微步进电机驱动器。它是通过LIN建立与主机远程连接的专用机电一体化方案。该芯片通过总线接收定位指令,随后驱动电机线圈到所需位置,可配置电流、速度、加速度和减速度等参数。该芯片自带电机堵转侦测。
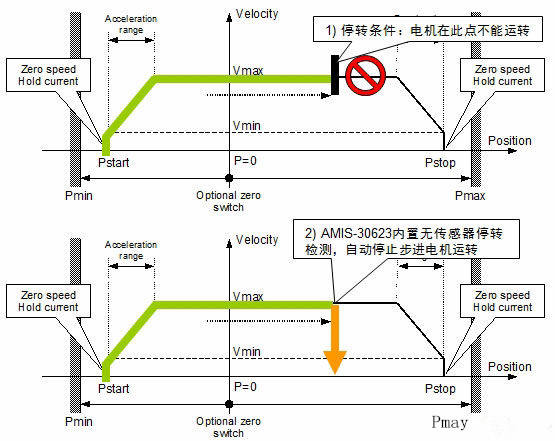
图5:AMIS-30623的工作原理示意图
NCV70522则是一款带稳压器及看门狗功能的SPI通信步进电机驱动IC。这单芯片微步进电机驱动器具有输出电流选择性、SPI接口、嵌入式5V稳压器和看门狗复位等特性。该芯片接收通过一个输入引脚脉冲信号启动"下一步微步"命令,输出线圈电流、微步数等参数。集成的SPI总线允许参数设定及诊断反馈。NCV70522的典型应用电路图如图6所示。
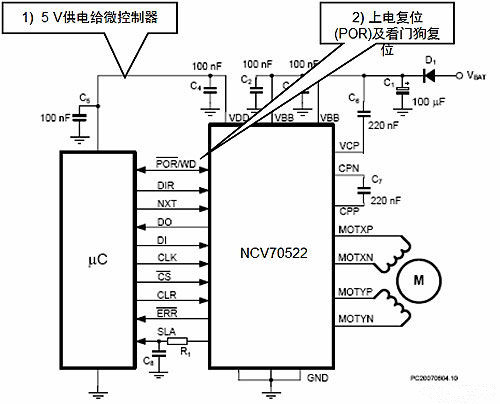
图6:NCV70522典型应用电路图
NCV70522应用设计要点
我们以NCV70522为例,介绍这芯片在AFS应用中的设计要点。NCV70522的控制要素包括步幅模式、NXT输入及电机运转方向(DIR)控制等。
1) SLA信号特性
NCV70522包含速度及负载角(SLA)输出,配合创建停转检测算法及控制环路,以根据电机的反电动势(BEMF)来调节转矩和速度。
2) SPI寄存器
NCV70522采用标准4线SPI通信(CLK, CSB, DI, DO),包含3个8位控制(Control)寄存器(0, 1, 2)和4个8位状态(Status)寄存器(0, 1, 2, 3)。
3)复位
CLR引脚为低电平(0)时,器件在正常模式;CLR引脚为高电平(1)时,器件复位。复位号器件内部寄存器值被清除为初始化值。
4) 设置线圈输出电流
NCV70522提供多种输出电流模式,可以通过SPI来对寄存器CUR[
- 技术分析:AFS系统步进电机控制和关键诊断(03-13)
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)