基于PSoC 4的无传感器BLDC控制
1. 引言
无刷直流电机(BLDC) 用电控装置取代了电刷和换向器,提高了电机的可靠性,并且具有体积小、效率高、噪音低等优点,在消费及工业应用中得到广泛应用。在BLDC控制中,励磁必须与转子位置同步,因此常用一个或多个转子位置传感器确定电机转子相对于电机定子的位置。采用位置传感器的BLDC控制方案较为简单,根据位置传感器的输出确定转子所处的区间,并相应的对电机绕组进行换相。然而,位置传感器的使用会带来一些缺点,如增加系统成本,降低可靠性;同时在一些特殊场合,如在电机处在浸没的环境中,则无法安装传感器。这就要求电机无位置传感器运行。
2. 无传感器控制方案
图1即为带霍尔传感器的BLDC换相图。方案采用常规的120°通电方式(六步换相), 为使电机运行,必须按照周期性间隔切换通电的相(即换相)。对于常规通电,每个电周期需要六次等距换相。每一步或每一区间,相当于60个电角度。六个区间组成了360 个电角度或一次电气旋转。每一区间上都有两个绕组通电,一个绕组未通电。要使电机正确换相,必须测量电周期中的绝对位置。采用三个霍尔传感器即可提供六次换相所需要的位置信息。

图1 BLDC换相图
在无传感器控制方案中,必须采用其他方式获取转子位置。转子位置的获得是BLDC无位置传感器控制中的关键技术。常见的转子位置检测有反电动势过零点检测法、反电动势三次谐波积分检测法、续流二极管检测法、磁链估计法等。其中最常用最经典的是反电动势过零点检测法。反电动势过零点检测法不需要详细了解电机特性,可适用于多种电机。
在六步换相过程中,每一区间上都有两个绕组通电,一个绕组未通电。这样在未通电绕组上会出现某相上电流为零,在电机引线上仍可看到电压的现象。这个电压就是反电动势。简单的说,反电动势(EMF)是永磁式电机转子转动时,由定子绕组所产生的电压。反电动势的幅值与电机转速成正比。在图1中,第1扇区中C相电压,第2扇区中的B相电压即为定子绕组产生的反电动势。
假设电机由±UV 电压驱动,则反电动势信号以0V为中心对称。如果反电动势信号为一条直线,那么信号将在该区间的一半处(也就是该区间的30°电角度处)通过零线。该点称为过零点。在过零事件后再经过30°电角度进行下一次换相。因此,精确检测过零点时刻便可估算转子位置,使电机绕组在正确的时间进行换相。如图2所示。
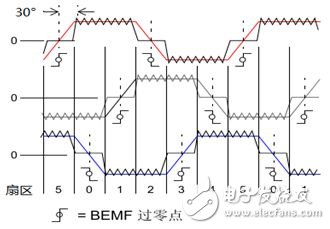
图2 BEMF过零点与换相图
3. 过零点检测方案

图3 BLDC驱动电路拓扑图
图3为典型的三相BLDC驱动电路拓扑图。假定三相端电压分别为Va,Vb,Vc;Vn为中性点电压;Ea,Eb,Ec为三相反电动势;Ia,Ib,Ic为三相电流,R为相电阻,L为电感。在C相为非导通相时可根据过零点时Va+Vb+Vc=0 及上面等式可得:
3Ec=2Vc-(Va+Vb)
根据以上等式,有三种不同的过零点检测方法:
1.直接用ADC采样三路端电压,根据上述公式判断过零点。此算法需采样多路ADC电压,且需软件滤波算法,对ADC及MIPS均有一定的要求。
2.在 PWM 输出信号为 OFF 时采样非通电相电压,将之与零电压比较。此算法在低速时比较有优势,因为低速时反电势信号比较弱,这种算法的采样区域恰为非通电相端电压过零区域。但当 PWM 的占空比比较高时,由于可供采样的时间点太短,容易造成采样失败。
3.在 PWM 输出信号为 ON 时采样非通电相电压,将之与母线电压的一半比较。此种算法则具有较宽的调速范围,较为通用。
本方案即采用第三种算法进行过零点检测。
4.基于PSoC 4的设计方案
PSoC 4 简介
PSoC 4 是基于ARM Cortex-M0 CPU的可编程嵌入式系统控制器家族,它集合了可编程模拟资源、可编程内部互联、用户可编程数字逻辑、通用的固定功能外设计以及高性能的ARM Cortex-M0 CPU子系统。相对于PSoC3、PSoC5系列产品的各个方面, PSoC 4都做了很大的改进。PSoC 4现包含CY8C4100 和CYCY8C4200两个产品系列,PSoC4100系列是基于ARM内核的最低成本的PSoC,它将PSoC的灵活性和高集成度引入对成本敏感的大批量生产的产品中。PSoC4200系列拥有速度更快的处理器,更高的ADC采样速度,以及基于PLD的增强型通用数字模块(UDB)。以下概括了其主要特性。
● 高性能 Cortex-M0 CPU 内核。基于48 MHz ARM Cortex-M0 中央处理器 , 支持单周期乘法。
● 固定功能以及可配置的数字模块。包括四个独立的可支持中央对齐的PWM,支持互补的可编程死区及同步ADC操作;两个可工作为SPI/UART/I2C 串行通信接口的串行通信模块(SCB);
- Cypress电容式触控元件出货量突破10亿颗(08-14)
- 基于PSoC4的BLDC电机控制系统的设计与实现(08-02)
- 灵活PSoC架构!单点、多点触控识别不是事(05-07)
- 赛普拉斯PSoC4芯片揭秘:玩转SAR ADC模块(05-17)
- 令人拍案称绝的10大最精致小微嵌入式开发板(07-01)
- 千万门级国产FPGA芯片突破还待时日(02-18)