嵌入式工业以太网的应用研究
1 引言
随着网络技术的发展,工业以太网成为了各国工控界的一个研究热点领域。国内开展这项研究较早的浙江大学,中科院沈阳自动化所,浙大中控等单位在国家"863"课题的支持下,起草了"用于工业测量和控制系统的EPA系统结构和通信标准",并力图在化工领域建成几个示范性应用项目。广东工业大学联合中南大学,中科院自动化所开展了嵌入式工业以太网的研究,并进行了"基于uClinux嵌入式系统的工业以太网控制器开发",致力于发挥嵌入式系统在工控领域的优势。
2 应用背景
压力、温度、水位和流量是化工、污水处理以及钢铁等行业中最常用的控制系统,为了研究在各种行业、不同工艺流程下的通用网络控制系统,所以本文中将不强调工艺流程。而应用试验的对象也将使用中南大学率先研发的仿工业现场的被控对象,本文将对最常用的压力、温度、水位和流量四个控制系统进行全面仿真工业现场的试验。
3 嵌入式工业以太网系统结构
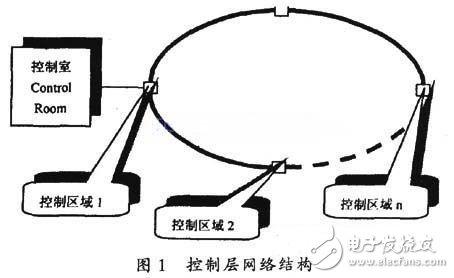
将企业现场网络分为控制层和设备层。针对现场对网络可靠性参数的严格要求,在控制层网络改进传统以太网拓扑结构。采用环形网络拓扑,可以增加网络的可靠性。
而解决网络的实时性问题则采用了控制区域(Control Domain)概念,将控制现场分区,减少各个控制区资源竞争的情况。而控制区域之间的是通过以太网交换机(交换式)来通信。
改进后的网络结构如图1所示。控制层网络由100M以太网构成组成环形网络。
每个控制区域(Control Domain)包含以太网交换机和嵌入式的工业以太网控制器,以及一些变送器和执行机构。如图2所示。

而位于控制区域中的工业以太网控制器采用嵌入式系统来设计。
4 嵌入式工业以太网控制器设计
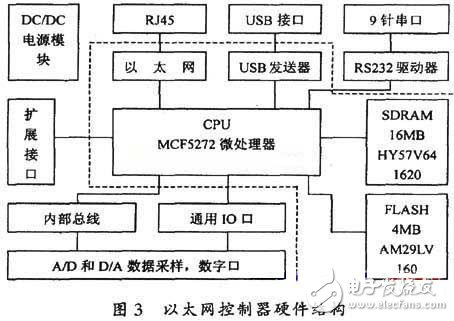
工业以太网控制器的硬件设计采用核心板与接口板分开设计的方式,增强了系统应用的灵活性,方便系统调试。图3中,虚线框所包含的模块组成核心板,虚线框以外的模块组成接口板。图中,以太网控制器中CPU是控制核心,负责控制所有辅助设备。存储器采用SDRAM和FLASH两种类型,能满足系统运行和调试的需要。基本端口包括以太网接口,USB接口,还有两个RS232的串口,能满足系统应用和调试的需要。A/D和D/A模块主要用于现场数据的采集与控制信号的输出 DC/DC模块主要负责整个系统的供电。扩展接口考虑了系统的可扩展性。
控制器的操作系统考虑到性价比以及现场控制需要,采用了 uClinux。uClinux是一个完全符合 GNU/GPL公约的操作系统,完全开放代码,其是专门为控制领域而裁减设计的嵌入式操作系统 uClinux从Linux 2.0/2.4内核派生而来,沿袭了主流Linux的绝大部分特性。它是专门针对没有 MMU的CPU,并且为嵌入式系统做了许多小型化的工作。适用于没有虚拟内存或内存管理单元(MMU)的处理器,例如Cold Fire。它通常用于具有很少内存或Flash的嵌入式系统。特别的为了应用到工业实时领域,还可以进一步增强uClinux的实时性。
整个嵌人式工业以太网控制器具有以下特点:
控制器具有很高的性能。CPU采用高集成度的Motorola Cold Fire微处理器,主频达到50Mhz,且其具有丰富的接口资源,增强了系统稳定性,嵌入式的uClinux能完成复杂的算法计算以及任务调度、网络等功能;
控制器具有很高的集成度。由于Motorola CPU具有丰富的接口资源,而uClinux裁减后体积非常小,而且具备以太网功能,这样可以很容易实现控制器的微型化、Internet化;
控制器具有很高的实时性。在设计硬件和软件时都充分考虑了系统的实时性。硬件设计中采用了高速的A/D(500khz)和多路D/A输出,使得关键信号能及时采样和输出,保证了"硬实时";操作系统中加入了RTlinux模块,保证了"软实时"。
5 应用技术方案
在试用嵌入式工业以太网系统时,选用四套不同控制装置,包括压力,温度,水位以及流量控制系统。选择压力、温度、水位、流量及各自调节阀门等10多个I/O信号。
以压力控制系统为例,如图4所示,它有3个互相串联的不同大小的气缸装置、两路进气管道以及其上的手动阀F1~F3、两台电/气转换器、气闭式气动阀Vcl 和Vc2以及3台压力变送器组成。其中,电/气转换器的输入控制信号为4~20mA,对应输出蒸汽压力20~100kPa(蒸汽源012MPa),相应气闭式气动阀的开度为100%~0,压力变送器的输入压力信号为O~80kPa,对应输出电流信号为4~20mA。
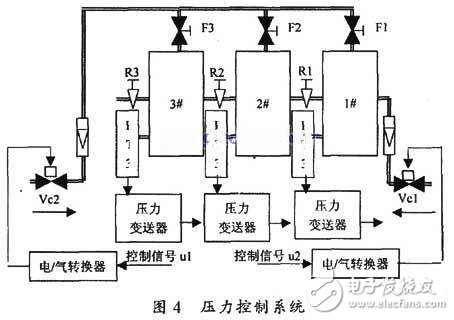
然后将根据测试点实际情况,将信号分组:本文中每个控制系统分为一组信号,如压力系统包括控制信号u1、u2,气闭式气动阀Vcl、Vc2以及R1- R3。可以看到:
每个控
- 下一代Flash存储器在工业控制领域技术与应用(02-05)
- 应对电机设计,安森美有何发展趋势及创新方案?(03-26)
- 以太网标准与驱动系统设计(04-20)
- 飞思卡尔最新工业机器人解决方案特点及优点分析(07-22)
- MCP8063三相正弦无传感器无刷电机工业控制驱动方案(07-04)
- 多种工业触摸屏的原理及特性解析(07-18)