以太网标准与驱动系统设计
因为多种原因,工业以太网已成为工厂自动化的主流技术。而没有引起同样重视的是,需要在供应商系统中实现这一通信技术。本文从工厂自动化供应商开发从机系统的角度出发,介绍实现工业以太网的各种选择,例如I/O模块和驱动等从机系统。
这些OEM面临的难题可以从查看机系统体系结构开始。供应商并非针对某一协议来设计从机系统,而必须支持可以在工厂中实现的任何标准,不能指定某一种协议,因此系统必须适应任何一种协议。
开发的从机协议新标准也有独特的硬件特性,它们不能使用标准MAC实现。这些都直接影响对实现平台的选择。
以太网简介
一开始,以太网——10 Mbps最初的以太网、100 Mbps的快速以太网,以及1 Gbps的千兆以太网,是在共享介质上在器件之间传送信号,都不能适应工业应用。而快速以太网(100 Mbps)的出现,其交换模式支持全双工功能,意味着可以在两个器件之间构建点对点链接,使得以太网能够用于大部分工业应用中。
但是,所有工业以太网协议都需要作出一定程度的判决,传统上是通过使用软件协议堆栈来解决的。一些新协议已经开始使用特殊MAC结构来实现更好的延时。图1显示了一些工业以太网协议的结构。
对速度的要求(或延时)
工厂自动化系统有实时响应要求。"实时"是什么?答案是取决于应用类型。有时候,按照数百毫秒来衡量,而有时候按照微秒来衡量。有不同的设计方法使得通信协议能够满足不同的延时要求。


图1:工业以太网协议体系结构
如图1所示,PHY层通常是独立的模拟器件。但是,可以在数字逻辑器件中实现其他功能,由处理器针对协议栈以及定制应用来运行软件。
而所有的工业以太网协议都需要特殊的软件堆栈,某些新协议在MAC以及交换上使用独特的非标准设计。
EtherCAT和Powerlink是两种较新的协议,需要特殊的MAC设计。特别是EtherCAT使用了创新的方法,在一个以太网帧中封装了更多的数据包。多个从机器件的数据被封装到一个以太网帧中。当从机器件读取以太网帧时,它必须为自己提取出数据包的内在含义,而忽略其他信息——更重要的是,它必须能够"随时"完成这一工作。当连接了很多从机器件时,也要满足最低延时要求。典型的应用是运动控制以及多轴机器人驱动。
这一协议好的一面是,会引起一个帧延时而不是256帧延时(如果您是网络上的第256个从机器件)。
为支持所选择的协议,从机器件中的MAC设计不同于传统的以太网MAC,是非标准的,需要FPGA或者ASIC特殊设计。图2显示了不同的实时要求是怎样导致通信协议标准不同体系结构的。
从系统设计的角度看,如果您必须支持标准MAC实现以及特殊实现,那么,设计应包含MAC设计,或者是硬件可编程的。
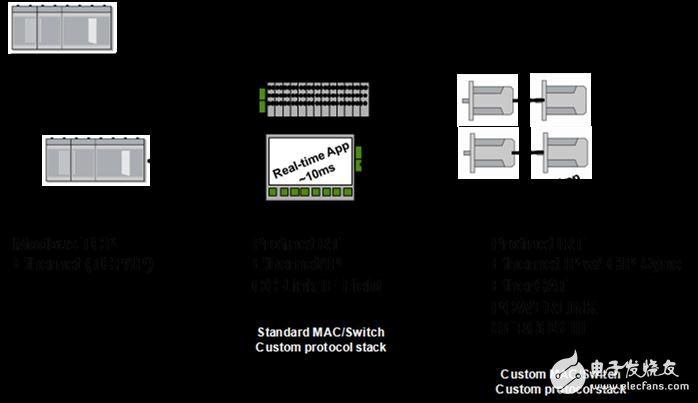
图2:不同的实时要求导致不同的实现
关键趋势影响了系统设计
驱动和I/O模块(工厂自动化中典型的从机器件)的第一个发展趋势是通信功能的深度嵌入,这是由于系统成本下降、外形减小以及功耗预算降低等因素造成的。
过去,客户花费数百美元来购买商用通信模块,然后将其加入到驱动模块中。这类模块性价比不高,而且也不适用于小外形封装驱动设计。
另一替代方案是包括单独的ASSP专用于实现通信功能。由于不同的客户会使用不同的工业以太网标准,因此,这种ASSP可能会被过度设计,以支持多种协议。
但是,供应商希望将他们所有的数字驱动功能集成到一个硅片中,要求通信协议功能规模不大,能够作为整个"芯片驱动"设计的组成部分来实现。
图3显示了工业以太网功能实现的转变。

图3:从模块到器件,到芯片集成功能
第二个趋势是工业以太网标准的快速发展。与现场总线协议相似,有很多类型的工业以太网协议,最重要的是,这些标准并没有在市场上合并。
驱动系统供应商必须能够支持6到8个标准,才能将其产品销售到全球不同的工厂中。例如,如果您希望在亚洲和欧洲同时销售您的驱动设备,同时适应EtherCAT和Ethernet Powerlink,那么,您需要:
· 设计、开发,并维持两组驱动设计
或者
· 包括ASSP以支持多种协议——希望协议不会变化
或者
· 使用可编程平台
表1列出了流行于全世界的某些竞争以太网标准。

表1:出现了竞争以太网标准,基于底层现场总线协议
过去,当工业以太网标准使用标准MAC/交换机时,很容易采用MPU进行通信。如果您需要支持新标准,您只需要交换协议栈(软件)。但是,正如前面所讨论的,很多新标准需要特殊的MAC实现。
很显然,应对
- 下一代Flash存储器在工业控制领域技术与应用(02-05)
- 应对电机设计,安森美有何发展趋势及创新方案?(03-26)
- 飞思卡尔最新工业机器人解决方案特点及优点分析(07-22)
- MCP8063三相正弦无传感器无刷电机工业控制驱动方案(07-04)
- 多种工业触摸屏的原理及特性解析(07-18)
- 嵌入式工业以太网的应用研究(04-21)