传输系统中的时钟同步技术
时间:02-11
来源:不详
点击:
抖动测量 — TIE、MITE 和 TEDV
时间间隔误差 (TIE) 是通过对实际时钟间隔的测量和对理想参考时钟同一间隔的测量得到的。在给定时间 t,以一个称为观测间隔的时间间隔产生时间 T(t) 的时钟,其相对于时钟 Tref(t) 的TIE 可通过下面公式表示。(x(t) 称为误差函数。)
TIE 表示信号中的高频相位噪声,提供了实际时钟的每个周期偏离理想情况的直接信息。TIE 用于计算大量统计派生函数如 MTIE、TDEV 等。
最大时间间隔误差 (MTIE) 定义为,在一个观测时间 (t=nt0) 内,一个给定时钟信号相对于一个理想时钟信号的最大峰到峰延迟变化,其中该长度的所有观测时间均在测量周期 (T) 之内。使用下面公式进行估计:

MTIE是针对时间的缓变或漂移而定义的。当需要分析时钟的长期特性时,就需要对MTIE进行测量。MTIE 值是对一个时钟信号的长期稳定性的一种衡量。
TDEV 是另外一个统计参数,作为集成时间的函数对一个信号的预期时间变化的测量。DEV 也能提供有关信号相位(时间)噪声频谱分量的信息。TIE 图中每个点的标准偏差是对一个观测间隔计算的,该观测间隔滑过整个测量时间。该值在整个上述测量时间内进行平均以得到该特定间隔的 TDEV 值。增大观测间隔,重复测量过程。TDEV 是对短期稳定性的一种衡量,在评估时钟振荡器性能时有用。TDEV 属于时间单位。
高速传输系统中抖动和漂移的原因
最常用的一种时钟体系结构是,在备板上运行一个低频时钟,在每个传输卡上产生同步的高频时钟。低频时钟在集成电路内或通过分立 PLL 实现进行倍频以产生高频时钟。通过典型的 PLL 倍频,倍频后时钟上的相位噪声增大为原来时钟相位噪声的 20*log(N) 次方,其中 N 为倍频系数。此外,PLL 参考时钟输入上的抖动将延长锁定时间,且当输入抖动过大时高速 PLL 甚至无法实现锁定。在备板上采用一种更高速的差分时钟将比采用低速单端时钟具有更好的抖动性能。
由于 VCO 对输入电压变化较为敏感,因此电源噪声是增大时钟抖动的一个主要因素。输出时钟抖动幅度与电源噪声幅度、VCO 增益成正比,与噪声频率成反比。因导线电阻形成的电阻下降和因导线电感形成的电感噪声而造成的电源或接地反弹,会对上述输出时钟抖动产生相似的影响。在系统板上对电源进行充分过滤,靠近集成电路电源引脚提供去耦电容,可以确保 PLL 获得更高的抖动性能。
在系统板内,时钟和数据相互独立,发射和接收端在启动、保持和延迟时间方面的变化对高速率非常关键。因数据和时钟路径中存在不同有源元件而使数据和时钟路径之间出现传播延迟差异, 时钟路径之间的接线延迟差异,数据位之间的接线延迟差异,数据和时钟路径之间不同的负载情况,分组长度差异等等,均可能造成上述变化。在规划系统抖动余量时,必须将不同信号路径的变化考虑在内。
当在一段距离上进行传输时,在发射机和接收机中的很多点上存在抖动累积。在发射机物理层实现中,DAC 非线性或激光非线性等非线性特性会加重信号失真。在传输介质和接收机中,除了外部乱真源(大多在铜导线中)之外,因不同频率和调制效应而导致的光纤失真、因接收机实现(主要与带宽有关)和时钟提取电路实现而导致的信号相关相位偏离,会加重信号流的抖动。
具体到 SDH(同步数字系列)传输,有大量的系统级事件会导致抖动。在将 PDH(准同步数字系列)支路映射为 SDH 帧并通过 SDH NE(网络组件)进行传输的典型传输系统中,在 PDH 支路于 SDH 的终端多路分配器解映射之前,将在每个中间节点处出现 VC(虚拟容器)的重新同步。有间隙的时钟用于将各个支路映射到 STM-N 帧和从 STM-N 帧解映射,发出与开销、固定填充和调整位相应的脉冲,因而造成映射抖动。采用调整机会位补偿 PDF 支路中频率偏移的方法会造成等待时间抖动。还有指针调整机制,用于对来自初始 NE 的输入 VC 与本地产生的输出 STM-N 帧之间的相位波动进行补偿。根据频率偏离,VC 在 STM-N 帧中前后移动。这将使 VC 提取点看到位流中的突然变化,导致称为指针抖动的类型抖动。所有上述系统级抖动都将加重总的确定性抖动。
尽管所有上述因素都会加重从源到目的地之间信号传播的抖动,标准要求仍然规定在传输点需具有比理论值更低的抖动数值。这样,考虑到时钟倍频、电源变化、电-光-电转换、发射和接收影响以及其他致使实际信号恶化的失真信号的影响,在源处驱动信号的时钟将具有一个相对很低的抖动数值。
时间间隔误差 (TIE) 是通过对实际时钟间隔的测量和对理想参考时钟同一间隔的测量得到的。在给定时间 t,以一个称为观测间隔的时间间隔产生时间 T(t) 的时钟,其相对于时钟 Tref(t) 的TIE 可通过下面公式表示。(x(t) 称为误差函数。)
TIE 表示信号中的高频相位噪声,提供了实际时钟的每个周期偏离理想情况的直接信息。TIE 用于计算大量统计派生函数如 MTIE、TDEV 等。
最大时间间隔误差 (MTIE) 定义为,在一个观测时间 (t=nt0) 内,一个给定时钟信号相对于一个理想时钟信号的最大峰到峰延迟变化,其中该长度的所有观测时间均在测量周期 (T) 之内。使用下面公式进行估计:
MTIE是针对时间的缓变或漂移而定义的。当需要分析时钟的长期特性时,就需要对MTIE进行测量。MTIE 值是对一个时钟信号的长期稳定性的一种衡量。
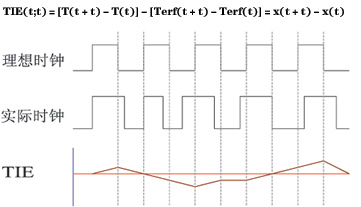
图 4.TIE 的图形表示
TDEV 是另外一个统计参数,作为集成时间的函数对一个信号的预期时间变化的测量。DEV 也能提供有关信号相位(时间)噪声频谱分量的信息。TIE 图中每个点的标准偏差是对一个观测间隔计算的,该观测间隔滑过整个测量时间。该值在整个上述测量时间内进行平均以得到该特定间隔的 TDEV 值。增大观测间隔,重复测量过程。TDEV 是对短期稳定性的一种衡量,在评估时钟振荡器性能时有用。TDEV 属于时间单位。
高速传输系统中抖动和漂移的原因
最常用的一种时钟体系结构是,在备板上运行一个低频时钟,在每个传输卡上产生同步的高频时钟。低频时钟在集成电路内或通过分立 PLL 实现进行倍频以产生高频时钟。通过典型的 PLL 倍频,倍频后时钟上的相位噪声增大为原来时钟相位噪声的 20*log(N) 次方,其中 N 为倍频系数。此外,PLL 参考时钟输入上的抖动将延长锁定时间,且当输入抖动过大时高速 PLL 甚至无法实现锁定。在备板上采用一种更高速的差分时钟将比采用低速单端时钟具有更好的抖动性能。
由于 VCO 对输入电压变化较为敏感,因此电源噪声是增大时钟抖动的一个主要因素。输出时钟抖动幅度与电源噪声幅度、VCO 增益成正比,与噪声频率成反比。因导线电阻形成的电阻下降和因导线电感形成的电感噪声而造成的电源或接地反弹,会对上述输出时钟抖动产生相似的影响。在系统板上对电源进行充分过滤,靠近集成电路电源引脚提供去耦电容,可以确保 PLL 获得更高的抖动性能。
在系统板内,时钟和数据相互独立,发射和接收端在启动、保持和延迟时间方面的变化对高速率非常关键。因数据和时钟路径中存在不同有源元件而使数据和时钟路径之间出现传播延迟差异, 时钟路径之间的接线延迟差异,数据位之间的接线延迟差异,数据和时钟路径之间不同的负载情况,分组长度差异等等,均可能造成上述变化。在规划系统抖动余量时,必须将不同信号路径的变化考虑在内。
当在一段距离上进行传输时,在发射机和接收机中的很多点上存在抖动累积。在发射机物理层实现中,DAC 非线性或激光非线性等非线性特性会加重信号失真。在传输介质和接收机中,除了外部乱真源(大多在铜导线中)之外,因不同频率和调制效应而导致的光纤失真、因接收机实现(主要与带宽有关)和时钟提取电路实现而导致的信号相关相位偏离,会加重信号流的抖动。
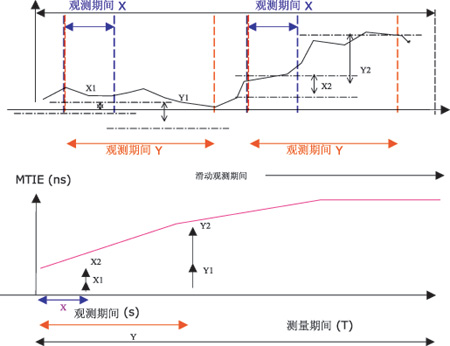
图 5.来自 TIE 图的 MTIE 偏差
具体到 SDH(同步数字系列)传输,有大量的系统级事件会导致抖动。在将 PDH(准同步数字系列)支路映射为 SDH 帧并通过 SDH NE(网络组件)进行传输的典型传输系统中,在 PDH 支路于 SDH 的终端多路分配器解映射之前,将在每个中间节点处出现 VC(虚拟容器)的重新同步。有间隙的时钟用于将各个支路映射到 STM-N 帧和从 STM-N 帧解映射,发出与开销、固定填充和调整位相应的脉冲,因而造成映射抖动。采用调整机会位补偿 PDF 支路中频率偏移的方法会造成等待时间抖动。还有指针调整机制,用于对来自初始 NE 的输入 VC 与本地产生的输出 STM-N 帧之间的相位波动进行补偿。根据频率偏离,VC 在 STM-N 帧中前后移动。这将使 VC 提取点看到位流中的突然变化,导致称为指针抖动的类型抖动。所有上述系统级抖动都将加重总的确定性抖动。
尽管所有上述因素都会加重从源到目的地之间信号传播的抖动,标准要求仍然规定在传输点需具有比理论值更低的抖动数值。这样,考虑到时钟倍频、电源变化、电-光-电转换、发射和接收影响以及其他致使实际信号恶化的失真信号的影响,在源处驱动信号的时钟将具有一个相对很低的抖动数值。
- 推陈出新 时钟同步技术的现状及发展(02-11)
- 基于SNMP的电源设备管理无线传输系统的框架组成(11-17)
- 基于物联网的智能电网解决方案(06-22)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)