这三种VR定位技术 重新打开您的新“视”界
情人节已经到了!在这个举世瞩目普天同庆的日子里,已有对象的都在筹划着如何才能虐狗,而单身狗们则想方设法的避免被强行灌狗粮,也是浑身解数、绞尽脑汁。这不,如何在这个特殊的节日里表示高姿态也是个技术活。或许你需要一个很会拍照的男伴或者女伴。
"什么?!你有女朋友了?什么时候交往的,处了几个月啦,关系有没有到哪个啥的?"
一众吃瓜群众总是接踵而至、一波未平另一波又起,一呼百应众口铄金总是百般难解。然而事实的真相总是惨痛的。

图解:总有一双永远牵着你的手,负责帮你拍美照,陪你走过千山万水。
哈哈!开了个玩笑,现在这里祝愿普天下情侣们节日快乐!Happy ValenTIne‘s Day!收花的收花,该吃巧克力的吃巧克力,该看电影的看电影,开心最重要!
下图就是偶平时上班的工作台,电子行业内每日无数的技术精品、美文赏识、群英活动,都是在这一方小小的空间产生的,哈哈哈。
小编今天也收到花了,摆拍一下给你们一众解解眼馋。

作为单身狗的你,或者今天有一套解决方案,仅需一个设备,打开您的手机app,自此外面的世界与我无关。

跑题太远了,万分抱歉!现今主流沉浸式VR设备的主要构成,大概有四部分。芯片与传感器、显示系统、光学透镜与外壳构件、光学定位及位置跟踪。小编今天就来给大家讲讲VR定位技术。
目前,在VR领域里,主要的位置跟踪定位技术,大体上可以分为四种:红外激光定位、红外光学定位、激光定位及可见光定位。这四种技术方案因生产成本、技术优劣、实现效果不同而各有特点,下面待小编慢慢为您们讲解。
一、HTC 与Valve共同研发的Lighthouse激光追踪系统
Vavle 是一家位于华盛顿州专门从事电子游戏开发的公司,也是超强内容生产商及平台服务商,在游戏行业逐年竞争加剧的市场上,Vavle适时与HTC达成共识,Vavle推出自家最核心的定位技术Lighthouse(俗称:灯塔),而HTC则负责Vive头显产品的外观设计。
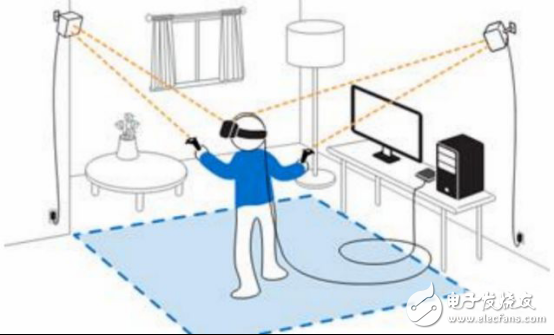
Value 进军虚拟现实领域,开发了独家的SteamVR 系统。据悉,这套系统最有特色的功能,就是房间追踪系统(Room-Scale),该系统可以让用户佩戴虚拟现实头盔在 15x15 空间范围内自由移动,并通过"Lighthouse"激光追踪系统实现位置定位。
Lighthouse 激光追踪系统的原理非常简单,其实就是利用房间中密度极大的非可见光,来探测室内佩戴 VR 设备的玩家的位置和动作变化,并将其模拟在虚拟现实 3D 空间中。而通过两个相对成本较低的探测盒子,就可以实现相对比较精准的定位。Vive头显和手柄上有超过70个光敏传感器,通过计算接收激光的时间来计算传感器位置相对于激光发射器的准确位置,通过多个光敏传感器可以探测出头显的位置及方向。
探测盒子的内部并没有安装摄像头,仅有一些固定的LED灯,并配置了一对转速非常快的激光发射器,设备工作的时候以每秒钟60次的速度频闪,一瞬间即可扫射整个房间。
激光发出以后,通过匹配VR设备头盔、或者VR手柄上的光传感器,可以探测激光发射器发射的频闪光、激光束。有趣的是,每频闪一次,VR头盔就会自动计算数字,像计时器一样,直到某个光传感器探测到激光束;然后利用光传感器的位置,以及激光到达的时间,利用算法计算出头盔相对基站的位置。
另外,如果同时有多个光传感器探测到一束激光,就会形成一个"姿势",不仅能标注头盔位置,而且可以模拟它运动方向的 3D 图像。
据称现今Valve已经开源了Lighthouse追踪技术,并宣称"使用技术授权者仅需支付2975美元参加指定的官方培训,后续无需再支付任何其他的版权费用,即可无条件使用Valve独家Lighthouse技术。" 这样是否也就意味着第三方开发者可以使用Lighthouse技术自主研发虚拟现实相关的可追踪设备、游戏手柄、控制杆以及其他VR头显外设?

Lighthouse 激光探测盒子内部构造图
二、Oculus Rift采用的主动式红外激光定位

熟悉Oculus Rift的用户可能都知道,Oculus Rift设备上会隐藏着一些红外灯(即为标记点),这些红外灯可以向外发射红外光,并用两台红外摄像机实时拍摄。所谓的红外摄像机就是在摄像机外加装红外光滤波片,这样摄像机只能拍摄到头显以及手柄(Oculus touch)上红外灯,从而过滤掉头显及手柄周围环境的可见光信号,提高了获得图像的信噪比,增加了系统的鲁棒性。
获得红外图像后,将两台摄像机从不同角度采集到的图像传输到计算单元中,再通过视觉算法过滤掉无用的信息,从而获得红外灯的位置。
再利用PnP算法,即利用四个不共面的
- 室内定位技术:用可见光通信破解接收难题(05-17)
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)