汽车自动驾驶系统层级定义详解
标的。所以总的来说,这个L2是所有车企在积累和提高特性的必争之地。
L3 有限度的自动驾驶
在某些环境允许的条件下,驾驶员可以完全放弃操控,交给自动化系统进行操控。如果系统出现问题,是不能完全自主进入安全状态的,需要驾驶人员来接管,但这个时间一般较短。虽然这个看上去不大实用,但是确实是德国三家豪车企业目前在自身系统演进过程中比较看重的点。这些发表的研究性的配置,都是基于L2的演进来考虑的。
没了驾驶员的确认,整个感知的要求高了很多:
准确度要求高了,不能出错,这里一定有融合对比;
感知范围距离要求高了,需要给自动驾驶决策时间;
对环境耐受性要求高,突然下冰雹和暴雨也需要时间来切换;
即使系统发生错误的时候,整个转换的退出还需要时间;
感知系统要有冗余性要求,既有融合情况,也有单个感知单元失效诊断之后fail-operaTIonal的要求,也要独立能运行。
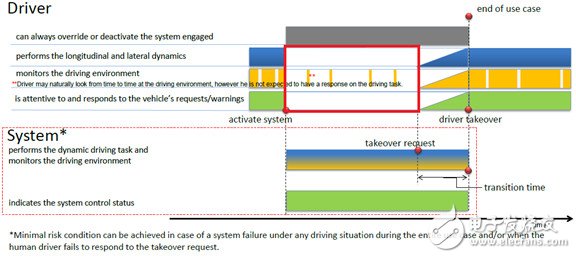
图3 L3的系统情况
因为L3没有进入产品化,所以这些研究阶段的配置可能会进一步进行调整,可以看出,L3阶段是之前L2顶级配置性能上面再进行演化。由于在运行中失去了驾驶员的监控,任何运行中的感知错误都是不能接受的(没看到车就会产生错误决策,就会出现问题)。
L4 全自动驾驶
在福特明确提出要做L4的自动驾驶和自动驾驶服务之前,没有哪个车企这么敢来做,因为这里一旦启动,已经对驾驶者没有要求。在之前看到的更多的,还是基于机场小型低速摆渡车、市区低速巴士之类的有限制的运行。
系统100%负责感知的准确性
系统100%要在设定的范围内完成所有驾驶员要做的事情,没有后备
系统在自身出问题和外界环境变化的时候,要考虑冗余的策略,保证车内和车外安全
自身感知、处理和执行段的所有故障诊断
自身感知、处理和执行段的Fail-OperaTIonal

图4 L4的运行情况
现阶段,L4的设计考虑还配置个安全驾驶员,这里的情况比较微妙,先做性能,再做冗余,下个阶段就完全考虑实现L4,到了这里就不打折扣了。
本文摘自汽车工程师朱玉龙文章
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)
- 单片式电池充电器简化太阳能供电设计(08-20)