汽车自动驾驶系统层级定义详解
CES2017正在美国拉斯维加斯举行,自动驾驶技术无疑成为了各大汽车和科技巨头争先抢夺的焦点。关于自动驾驶你了解多少?本文将详解不同分级自动驾驶技术的意义。
自动驾驶系统需要进行分级,从细节上去考虑,目前美国已形成了统一,以SAE InternaTIonal关于自动化层级的定义为准,如下:
L0 :驾驶员完全掌控车辆;
L1 :自动系统有时能够辅助驾驶员完成某些驾驶任务;
L2 :自动系统能够完成某些驾驶任务,但驾驶员需要监控驾驶环境,完成剩余部分,同时保证出现问题,随时进行接管。在这个层级,自动系统的错误感知和判断有驾驶员随时纠正,大多数车企都能提供这个系统。L2可以通过速度和环境分割成不同的使用场景,如环路低速堵车、高速路上的快速行车和驾驶员在车内的自动泊车;
L3 :自动系统既能完成某些驾驶任务,也能在某些情况下监控驾驶环境,但驾驶员必须准备好重新取得驾驶控制权(自动系统发出请求时)。所以在该层级下,驾驶者仍无法进行睡觉或者深度的休息。在L2完成以后,车企的研究领域是从这里延伸的。由于L3的特殊性,目前看到比较有意义的部署是在高速L2上面做升级;
L4 :自动系统在某些环境和特定条件下,能够完成驾驶任务并监控驾驶环境;L4的部署,目前来看多数是基于城市的使用,可以是全自动的代客泊车,也可以是直接结合打车服务来做。这个阶段下,在自动驾驶可以运行的范围内,驾驶相关的所有任务和驾乘人已经没关系了,感知外界责任全在自动驾驶系统,这里就存在着不同的设计和部署思路了;
L5 :自动系统在所有条件下都能完成的所有驾驶任务。
我们所说的自动驾驶系统,通常是在3~5层级,随着层级的提高,对系统的要求也随之提高。由于目前自动驾驶的分级,特别是L3和L4处在还没有大规模应用在实际生活之中,我们对待这个需求就存在着一些认知上的争议。
分类方法:以DDT、DDT的任务支援和设计运行范围来区分;
动态驾驶任务(DDT):是指在道路上驾驶车辆需要做的操作和决策类的行为;
车辆执行:包括通过方向盘来对车辆进行横向运动操作 、通过加速和减速来控制车辆;
感知和判断(OEDR):对车辆纵向运动方向操作、通过对物体和事件检测、认知归类和后续响应,达到对车辆周围环境的监测和执行对应操作、车辆运动的计划还有对外信息的传递。
动态驾驶任务支援(DDT Fallback):自动驾驶在设计时候,需要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,当这两者发生的时候,需给出最小化风险的解决路径。
设计运行范围(ODD)就是一组参数,把我们知道的天气环境、道路情况(直路、弯路的半径)、车速、车流量等信息作出测定,以确保系统的能力在安全的环境之内。

图1 设计适用范围的对比
L2 组合驾驶
驾驶员和汽车来分享控制权,系统同时具有纵向和侧向的自动控制,且具备两项以上。在整个开启的过程中,驾驶员可以不操作方向盘、油门和刹车(放弃主要控制权),但需要观察周围情况,并提供安全操 作 。
驾驶员必须随时待命,在系统退出和系统出错的情况下随时接上。
自动驾驶系统:我们从控制和感知进行分解
对执行器的要求可以看出来,是需要对纵向的动力总成和刹车系统,横向的转向系统进行融合控制。
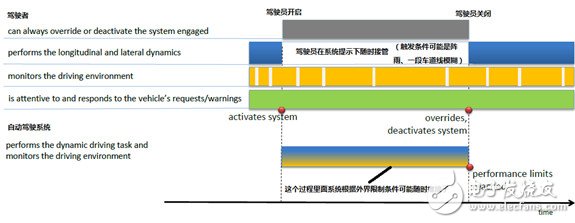
图2 L2的工作方式
解析L2的感知需求,是需要把整个场景考虑清楚
低速自动泊车场景:感知车位、行人、车辆
低速环路堵车辅助场景:识别车辆、摩托车、车道线
高速封闭道路场景:识别车辆、车道线
我们在现实中看到的L2系统,既有单个摄像头实现的TJA,也有很多差异化设计。这里由于有着驾驶员随时监控环境这条要求区分,车企可以选择做得少也可以选择做的多一些,因为不管是感知还是驾驶决策,完全依照车企对L2自动驾驶的需求不同来调整。
既有拿一个LRR、5个SRR、2个Camera来做的,也有拿单摄像头来进行处理的低成本方案。
既可以仅靠车道识别来进行车辆居中保持,也可以依靠高精度定位和高速道路地图来实现车道的匹配和居中,提高横向控制特性。
这里的核心区别,就是对以下的内容进行限制:
对不同的道路、基础设施的可容忍性
车速的运行范围
对感知错误(误识别率)的容忍性
对自动驾驶系统在不同流量环境下的改进可行性,往L3进化可能性
对车主的使用的判研以评估综合风险性
我们在把这些拿出来讨论的时候,其实是可以考虑做一份工程的规范,然后根据各个车企的配置情况来进行测试和对
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)
- 单片式电池充电器简化太阳能供电设计(08-20)