分析机器人避障技术:从传感器到算法原理
避障常用哪些传感器
不管是要进行导航规划还是避障,感知周边环境信息是第一步。就避障来说,移动机器人需要通过传感器 实时获取自身周围障碍物信息,包括尺寸、形状和位置等信息。避障使用的传感器多种多样,各有不同的原理和特点,目前常见的主要有视觉传感器、激光传感器、红外传感器、超声波传感器等。下面我简单介绍一下这几种传感器的基本工作原理。
超声波
超声波传感器的基本原理是测量超声波的飞行时间,通过d=vt/2测量距离,其中d是距离,v是声速,t是 飞行时间。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。
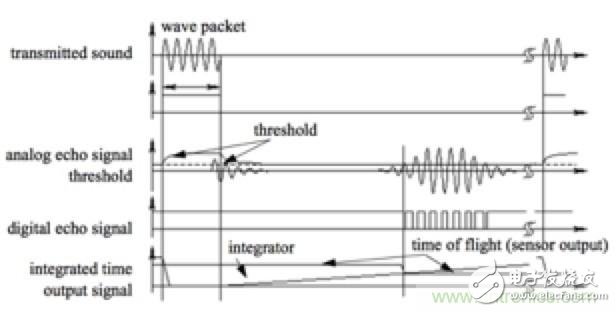
上面这个图就是超声波传感器信号的一个示意。通过压电或静电变送器产生一个频率在几十kHz的超声波脉冲组成波包,系统检测高于某阈值的反向声波,检测到后使用测量到的飞行时间计算距离。超声波传感器一般作用距离较短,普通的有效探测距离都在几米,但是会有一个几十毫米左右的最小探测盲区。由于超声传感器的成本低、实现方法简单、技术成熟,是移动机器人中常用的传感器。超声波传感器也有一些缺点,首先看下面这个图。
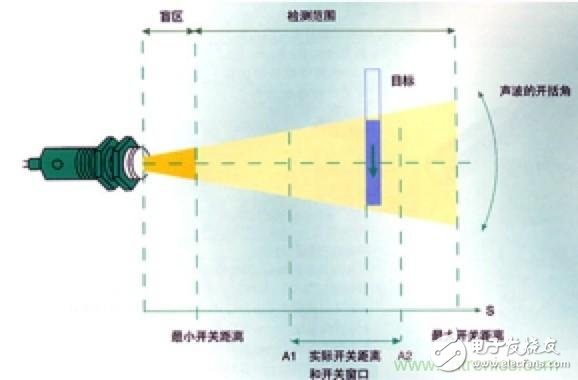
因为声音是锥形传播的,所以我们实际测到的距离并不是 一个点,而是某个锥形角度范围内最近物体的距离。
另外,超声波的测量周期较长,比如3米左右的物体,声波传输这么远的距离需要约20ms的时间。再者,不同材料对声波的反射或者吸引是不相同的,还有多个超声传感器之间有可能会互相干扰,这都是实际应用的过程中需要考虑的。
红外
一般的红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离D。
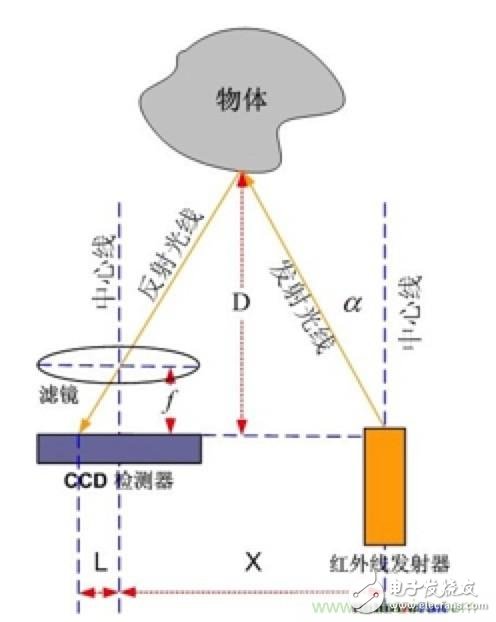
当D的距离足够近的时候,上图中L值会相当大,如果超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小,测量?精度会变差。因此,常见的红外传感器测量距离都比较近,小于超声波,同时远距离测量也有最小距离的限制。另外,对于透明的或者近似黑体的物体,红外传感器是无法检测距离的。但相对于超声来说,红外传感器具有更高的带宽。
激光
常见的激光雷达是基于飞行时间的(ToF,TIme of flight),通过测量激光的飞行时间来进行测距d=ct/2,类似于前面提到的超声测距公式,其中d是距离,c是光速,t是从发射到接收的时间间隔。激光雷达包括发射器和接收器 ,发射器用激光照射目标,接收器接收反向回的光波。机械式的激光雷达包括一个带有镜子的机械机构,镜子的旋转使得光束可以覆盖 一个平面,这样我们就可以测量到一个平面上的距离信息。
对飞行时间的测量也有不同的方法,比如使用脉冲激光,然后类似前面讲的超声方案,直接测量占用的时间,但因为光速远高于声速,需要非常高精度的时间测量元件,所以非常昂贵;另一种发射调频后的连续激光波,通过测量接收到的反射波之间的差频来测量时间。
图一
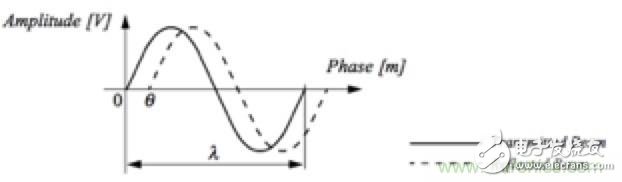
图二
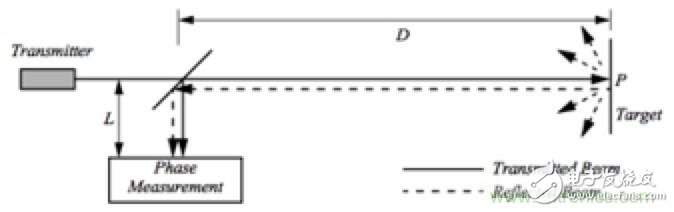
比较简单的方案是测量反射光的相移,传感器以已知的频率发射一定幅度的调制光,并测量发射和反向信号之间的相移,如上图一。调制信号的波长为lamda=c/f,其中c是光速,f是调制频率,测量到发射和反射光束之间的相移差theta之后,距离可由lamda*theta/4pi计算得到,如上图二。
激光雷达的测量距离可以达到几十米甚至上百米,角度分辨率高,通常可以达到零点几度,测距的精度也高。但测量距离的置信度会反比于接收信号幅度的平方,因此,黑体或者远距离的物体距离测量不会像光亮的、近距离的物体那么好的估计。并且,对于透明材料,比如玻璃,激光雷达就无能为力了。还有,由于结构的复杂、器件成本高,激光雷达的成本也很高。
一些低端的激光雷达会采用三角测距的方案进行测距。但这时它们的量程会受到限制,一般几米以内,并且精度相对低一些,但用于室内低速环境的SLAM或者在室外环境只用于避障的话,效果还是不错的。
视觉
常用的计算机视觉方案也有很多种, 比如双目视觉,基于TOF
- 用ARM和FPGA搭建神经网络处理器通信方案(07-19)
- 机器学习算法盘点:人工神经网络、深度学习(07-02)
- 基于模糊神经网络的机器人位置控制系统设计(08-18)
- 基于模糊行为和神经网络的机器人视觉伺服控制方案(08-19)
- 人工智能全新突破:神经网络可自主识别图片中的对象(11-09)
- Imagination AI解决方案性能领先最接近竞争对手2倍(08-25)