分析机器人避障技术:从传感器到算法原理
型的示例图,最上的图a左上角是出发点,右下角是目标点,中间三个方块是障碍物。中间的图b就是等势位图,图中的每条连续的线就代表了一个等势位的一条线,然后虚线表示的在整个势场里面所规划出来的一条路径,我们的机器人是沿着势场所指向的那个方向一直行走,可以看见它会绕过这个比较高的障碍物。最下面的图,即我们整个目标的吸引力还有我们所有障碍物产生的斥力最终形成的一个势场效果图,可以看到机器人从左上角的出发点出发,一路沿着势场下降的方向达到最终的目标点,而每个障碍物势场表现出在很高的平台,所以,它规划出来的路径是不会从这个障碍物上面走的。
一种扩展的方法在基本的势场上附加了?另外两个势场:转运势场和任务势场。它们额外考虑了由于机器人本身运动方向、运动速度等状态和障碍物之间的相互影响。
转动势场考虑了障碍与机器人的相对方位,当机器人朝着障碍物行走时,增加斥力, 而当平行于物体行走时,因为很明显并不会撞到障碍物,则减小斥力。任务势场则排除了那些根据当前机器人速度不会对近期势能造成影响的障碍,因此允许规划出 一条更为平滑的轨迹。
另外还有谐波势场法等其他改进方法。势场法在理论上有诸多局限性, 比如局部最小点问题,或者震荡性的问题,但实际应用过程中效果还是不错的,实现起来也比较容易。
向量场直方图(VFH)
它执行过程中针对移动机器人当前周边环境创建了一个基于极坐标表示的局部地图,这个局部使用栅格图的表示方法,会被最近的一些传感器数据所更新。VFH算法产生的极坐标直方图如图所示:
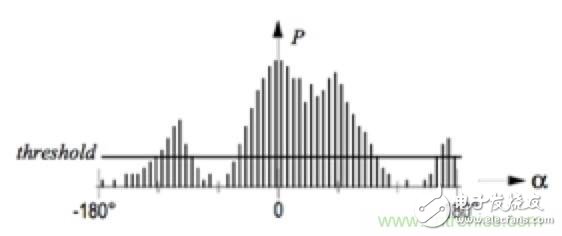
图中x轴是以机器人为中心感知到的障碍物的角度,y轴表示在该方向存在障碍物的概率大小p。实际应用的过程中会根据这个直方图首先辨识出允许机器人通过的足够大的所有空隙,然后对所有这些空隙计算其代价函数,最终选择具有最低代价函数的通路通过。
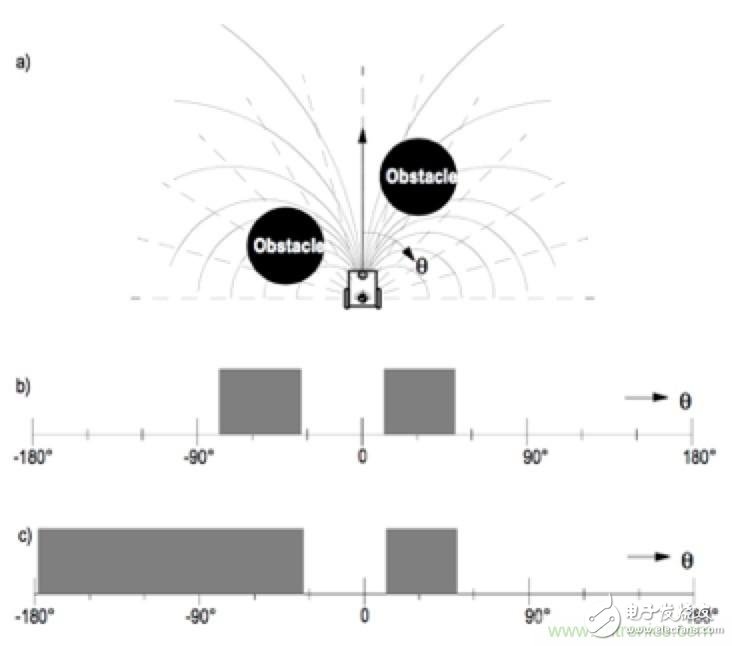
代价函数受三个因素影响: 目标方向、机器人当前方向、之前选择的方向,最终生成的代价是这三个因素的加权值,通过调节不同的权重可以调整机器人的选择偏好。VFH算法也有其他的扩展和改进,比如在VFH+算法中,就考虑了机器人运动学的限制。由于实际底层运动结构的不同,机器的实际运动能力是受限的,比如汽车结构,就不能随心所欲地原地转向等。VFH+算法会考虑障碍物对机器人实际运动能力下轨迹的阻挡效应,屏蔽掉那些虽然没有被障碍物占据但由于其阻挡实际无法达到的运动轨迹。我们的E巡机器人采用的是两轮差动驱动的运动形式,运动非常灵活,实际应用较少受到这些因素的影响。
具体可以看 一下这个图示:
类似这样传统的避障方法还有很多,除此之外,还有许多其他的智能避障技术,比如神经网络、模糊逻辑等。
神经网络方法对机器人从初始位置到目标位置的整个行走路径进行训练建模,应用的时候,神经网络的输 入为之前机器人的位姿和速度以及传感器的输 入,输出期望的下一目标或运动方向。
模糊逻辑方法核心是模糊控制器,需要将专家的知识或操作人员的经验写成多条模糊逻辑语句,以此控制机器人的避障过程。 比如这样的模糊逻辑:第一条,若右前方较远处检测到障碍物,则稍向左转;第 二条,若右前方较近处检测到障碍物,则减速并向左转更多角度;等等。
避障过程中存在哪些问题
传感器失效
从原理上来讲,没有哪个传感器是完美的,比方说机器人面前是一块完全透明的玻璃,那么采用红外、激光雷达或视觉的方案,就可能因为这个光线直接穿过玻璃导致检测失败,这时候就需要超声波这样的传感器来进行障碍物的侦测。所以我们在真正应用的过程中,肯定都需要采取多种传感器的结合,对不同传感器采集到的数据进行一个交叉验证,以及信息的融合,保证机器人能够稳定可靠的工作。
除此之外也有其他模式可能导致传感器失效,比如超声波测距,一般需要超声阵列,而阵列之间的传感器如果同时工作的话,会容易互相产生干扰,传感器A发射的光波反射回来被传感器B接收,导致测量结果出现错误,但是如果按照顺序一个个工作,由于超声波传感器采样的周期相对比较长,会减慢整个采集的速度,对实时避障造成影响,这就要求从硬件的结构到算法都必须设计好,尽可能提高采样速度,减少传感器之间的串扰。
还有比如说,机器人如果需要运动的话,一般都需要电机和驱动器,它们在工作过程中都会产生电容兼容性的问题,有可能会导致传感器采集出现错误,尤其是模拟的传感器,所以在实现过程中要把电机驱动器等设备、传感器的采集部分,以及电源
- 用ARM和FPGA搭建神经网络处理器通信方案(07-19)
- 机器学习算法盘点:人工神经网络、深度学习(07-02)
- 基于模糊神经网络的机器人位置控制系统设计(08-18)
- 基于模糊行为和神经网络的机器人视觉伺服控制方案(08-19)
- 人工智能全新突破:神经网络可自主识别图片中的对象(11-09)
- Imagination AI解决方案性能领先最接近竞争对手2倍(08-25)