基于模糊行为和神经网络的机器人视觉伺服控制方案
时间:08-19
来源:武汉科技大学信息学院
点击:
的视觉伺服方法。
2.3 智能抓取中的局部神经网络(Local Neural Network in Intelligent Grasp)
2.4 系统整体实现方案(Implementation Scheme for the Whole System)
系统的整体实现方案如图1所示。整个智能抓取操作分手爪的初步定位和精确定位等两步进行。
2.4.1 手爪的初步定位(Initial Position of the Grasper)
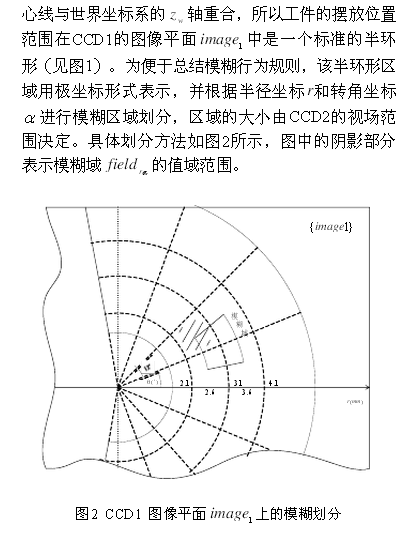
手爪的初步定位由基于模糊行为规则的视觉伺服控制器完成。鉴于手眼CCD2的视线范围有限,本方案首先通过安装在机器人基座正上方的固定摄像机CCD1对整个工作空间场景进行观察。由于CCD1的轴

4 结论(Conclusion)
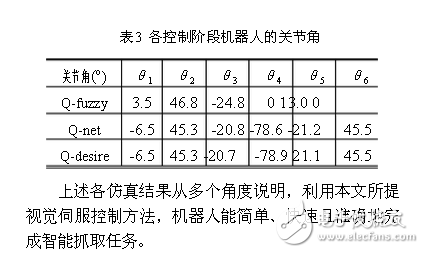
本文针对机器人的智能抓取作业,提出一种能总结人的模糊操作经验的视觉伺服新方法。本方法将机器人的抓取操作分成模糊初步定位和神经网络精确调整两个阶段来完成,具有控制规律易获取,控制误差能收敛,控制速度快以及控制精度高等特点。通过对六自由度机器人智能抓取任务的仿真说明所提方法的有效性。
- 用ARM和FPGA搭建神经网络处理器通信方案(07-19)
- 机器学习算法盘点:人工神经网络、深度学习(07-02)
- 基于模糊神经网络的机器人位置控制系统设计(08-18)
- 分析机器人避障技术:从传感器到算法原理(10-25)
- 人工智能全新突破:神经网络可自主识别图片中的对象(11-09)
- Imagination AI解决方案性能领先最接近竞争对手2倍(08-25)