电子动力转向系统架构及控制器选型指南
。闪存在实体上被分成多个模块,并采用了纠错和监视功能,可获得更高的执行可靠性。每个闪存区都可通过密码分别实现读写保护。可用来管理数据的嵌入式SRAM容量为50KB。此外还采用了一种额外的保护机制来防止对重要CPU缓存器的未授权存龋为了进一步提高执行可靠性,当某些受限指令被执行或者是CPU堆栈写入溢出时也可以触发保护机制。
外围功能
XC2300的外围模块包含了灵活的定时单元、三个USIC模块(用于支持不同的同步和异步串行接口)、撷取/比较(CAPCOM)模块、一个实时频率和看门狗功能、两个独立的高速10位A/D转换器(转换时间》=1.2μs)以及三个CAN模块。众多的触发器资源允许AD转换与具有相应延迟的CAPCOM定时器单元之间实现同步。内建有限的几个检查器可以对多个电压源进行后台监视,不会增加CPU任何负担。
CAPCOM6撷取/比较单元是专门开发来支持独立于CPU的多相马达控制。以CPU频率作为其执行频率的两个独立的16位宽定时器被作为时间基准。CAPCOM6模块能够产生多达7个的独立脉宽调变信号,或储存输入信号持续时间和工作周期。它在80MHz的系统频率下可以提供12.5ns的分辨率。一个8位的定时器支持死区时间(dead time)产生。该信号可以单独分配给每个通道。由于采用了同步设计和影子缓存器,缓存器更新可得到正确的定义。CAPCOM6单元支持同步和异步脉宽调变。在产生错误时,每个输出都可以立即进入不活动状态。在一个系统中,使用两个CAPCOM6单元可以最多控制两个马达。所有外围模块都通过一条高速16位外围总线连接到CPU。XC2300系列微控制器中外围模块的整合度比其它微控制器架构要高,因此CPU可以集中资源执行运算和诊断任务。XC2365微控制器中的关键功能模块如图2所示。
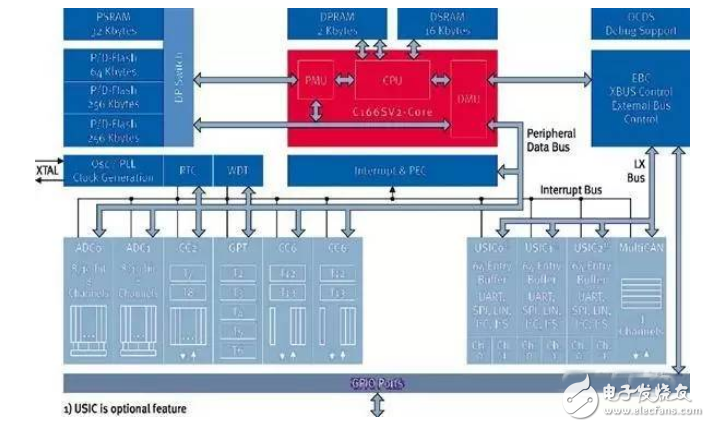
图2:XC2365微控制器。
XC2300微控制器支持芯片上除错,可通过断点、内存/缓存器存取和单步执行等方法来进行高效且低成本的系统仿真。
为因应越来越短的产品开发周期,诸如仿真器、除错器、编译程序、汇编器和评估板以及软件工程师使用的CASE工具和自动程序代码产生器等工具变得愈加重要,特别是在汽车产业。随着C166架构被广泛接受,开发人员现已能运用经过验证的开发工具组。英飞凌已提供多种相关评估工具套件、软件实例和应用指南。
XC2300系列微控制器具有强大的MAC单元、CAPCOM6单元和双ADC,它专门针对EPS系统进行优化,能满足这些系统的要求。此外,像CRC单元和全面诊断能力等特性则进一步提高了程序执行的可靠性。
- 应急电源用的EPS和UPS电源(12-03)
- EPS应急电源作为后备电源的优势(04-12)
- EPS电源和UPS电源解析(07-06)
- EPS与UPS的区别比较(06-18)
- EPS应急电源的工作原理(10-16)
- UPS不间断电源与EPS应急电源系统的比较与分析(12-19)