自动泊车内部结构及厂家方案介绍
3.车库位置的自动入位
3.1 检测周边环境、车位的信息,制定入库策略
3.2 自动转弯进入
3.3 如果有紧急情况进行刹车
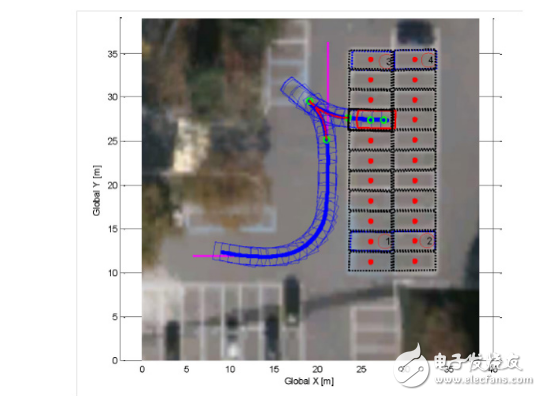
△图9 车辆入库轨迹计划
所以这个故事也比较简单,我们可以看到全球几乎所有的车企都在筹划这些方案,比较典型的如V-Charge大众方案、雷诺方案、本田方案。关于传感器、地图等配置以及具体技术路线有两个案例:
案例一——V-Charge方案
摄像头+超声波传感器被安排成360°覆盖周围环境。
12 个超声传感器负责短距离探测。
2个双目立体摄像头。
4个鱼眼摄像头,做360度环视。
连接到远程停车场服务器后,车辆定位会接收到专门设计的地图+停车场的道路网络信息。
本地地图存储了停车场的所有地方,使车辆可以根据摄像的信息来确定自身位置。
不依赖于GPS传感器,从而使导航也是在室内环境中,如地下停车位(GPS不可用时),并完善提供厘米级的精度。
这里配合无线充电,停车场的费用管理,加了不少别的东西进去。
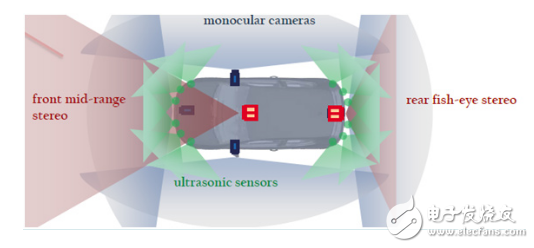
△图10 V-Charge方案
案例二——法雷奥方案
超声传感器:必须短距离测距,前后各6个,12个标配。
视觉传感器:一般用两个双目传感器(前后),视觉是主要解决车位的形状和定位问题的。
激光雷达用的是SCALA 的激光雷达,好处是可靠性更高一些。
这个更加纯粹一些,因为总体而言,它是按照方案来走的,而不是演示项目的概念。
车云小结
总的来说,未来停车场等基础设施智能化,特别是建立一个局部道路分配的计算云以后,会与路上所有的智能车辆之间通信交互和协同。自动泊车未来会涉及到诸多领域之间碰撞,使智能后台系统和运动终端开始博弈整个智能化的未来。
- 自动泊车技术的发展与原理解析(04-18)
- 用节省燃料的启动/停止系统为汽车电子产品供电(08-17)
- 新型汽车设计需要降压-升压型转换器(07-02)
- 汽车电子极近场EMI扫描技术方案 (01-20)
- 最大限度地减小在汽车环境中的EMI(02-14)
- 看半导体公司如何助力车联网技术(07-22)