“机器换人”蓄势待发 它们是如何感知世界的?
对于曾经依靠密集劳动力走向世界的"中国制造",机器人正成为转型升级的新助力之一。在珠三角,家电业率先"机器换人",电子信息产业紧紧跟上,汽车、纺织服装等行业也蓄势待发,一个个"无人工厂"取代了曾经工人们挥汗如雨的车间厂房。

那么你可知道,机器人是依靠什么感官来感知世界,与我们互动的?它们有"眼睛"、"鼻子"、"耳朵"吗?本文为大家盘点几种机器人常用的传感器及其功能。
用于避障的传感器
避障可以说是各种机器人最基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。
最典型的接触式测障传感器便是碰撞开关(图1)。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。当碰撞开关的外部探测臂受到碰撞,探测臂受力下压,带动碰撞开关内部的簧片拨动,从而电路的导通状态发生改变(图2)。

图1 碰撞开关
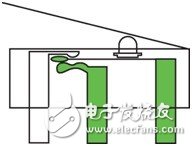
图2 碰撞开关的工作状态图
在机器人上的用法多数是将探测臂加长,扩大探测范围和灵敏度。当机器人撞到前面的障碍物,碰撞开关的信号端便可返回一个高电平,控制芯片由此可以知道小车面前存在着障碍物。
碰撞开关的优点是价格便宜,一般每只零售仅几块钱,使用简单,使用范围广,对环境条件没有什么限制。但碰撞开关也有个最明显的缺点,就是必须在发生碰撞后才能检测到障碍,这在某些机器人比赛中是相当失分的,在某些实际的应用中实用性也会大大降低,而且使用时间较长后,开关容易发生机械疲劳,无法继续正常工作。
非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。我们最常用的便是发射和接收红外线的传感器(图3,图4)。

图3 红外发射管
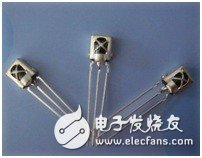
图4 红外接收管
红外测障传感器成本较低(当然比碰撞开关还是要高一点),电路简单,检测范围大。如果在电路中加上一个电位器,就可以随时调节传感器的检测范围。这种检测方式为非接触式,控制起来更加方便、灵活。但这种测障方式也有缺点,多个红外传感器之间容易互相干扰,因此在传感器的布局上需要多花心思,安装位置也要尽可能地避免红外信号的碰撞。
用于测距的传感器
机器人光知道哪个方向有障碍物并不够,还必须知道障碍物距离自己具体有多远,才好判断下一步的行动。这时我们就需要测距传感器。
测距传感器大多为非接触式的,目前在个人机器人制作领域用得比较多的是红外和超声波测距传感器两种。
提到红外测距传感器, 就不能不提夏普的GP2D12红外测距传感器(图5)。GP2D12几乎可以说是机器人爱好者的必备传感器,在我们平时常看到的一些个人机器人作品中,绝大多数都可以看到它的身影。
无图无真相,相信很多朋友看到GP2D12的实物图都会禁不住感叹:"哦,原来是它呀!"是不是很眼熟?说实话,除了在个人机器人上,我还真没在其他的地方见过这个东西。

(图5)红外测距传感器
这种传感器的优点是体积小,测量准确,电源电压与输出信号都较常规,一般单片机系统都可直接使用,缺点是成本较高,购买途径较少。
超声波测距传感器(图6)也是一种很常见的测距传感器,依靠超声波的发射与反射接收中的时间差来判断距离,这和动物界的蝙蝠是一样的,算是仿生学的一项应用。

图6 超声波测距传感器
超声波测距传感器规格很多,测试距离也从远到近都有,价格相差也较大,一般机器人爱好者使用的是测量范围在几厘米到几米的。
超声波测距的优点在于测量范围较大且不使用光学信号,所以被测物体的颜色对于测量结果没有影响,但其成本较高。由于它依靠声速测距,所以对于一些影响声速的因素较敏感,比如温度、风速等,而且最大允许角度较小。
用于亮度判断的传感器
很多朋友制作的机器人都需要判断环境光的亮度,这时就需要亮度传感器。最常用的便是光敏电阻(图7)。光敏电阻是一种随着照射在上面的可见光强度变化而阻值发生相应变化的电阻,可以根据其阻值的变化判断出光强。

图7 光敏电阻
光敏电阻的使用也非常简单,只要将它当作普通电阻接入电路,根据电流变化便可得出电阻值的变化,进而判断出光强的变化。对于机器人制作,光敏电阻是一种成本低廉、可靠性好、测量准确的元件。
用于测量速
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)