FPGA的无线通信安全协议应用
时间:03-07
来源:维库
点击:
,等待下一组的指令信息。
3.2 收发器的软件设计
通信系统的软件主要有两部分:一是AT89LS52上的从RS 232接收和往PTR6000发射数据;二是DSP2407A从PTR6000接收数据。图3给出它们的流程框图。
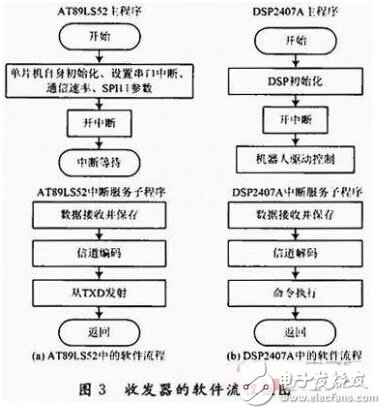
发射器中的单片机AT89LS52接收到上位机的通信指令后,将接收到的数据按照通信协议打包,然后通过对CLK1引脚和DATA引脚编程按照数据手册上的时序图将数据按位写入PTR6000并以广播形式发送给各个足球机器人。
足球机器人的接收程序则由机器人上的DSP2407A执行,每个机器人根据各自设定的编号,从接收缓冲区取出相应左右轮速度值。接收端的PTR6000在收到与本机地址相同的数据包后将DR1数据就绪引脚置为高电平,由于本设计将此引脚连接到了DSP的XINT2中断引脚,因此DR1的上升沿将导致DSP转入执行中断服务程序,通过对CLK1和DATA引脚编程以数据手册提供的时序读取接收数据。
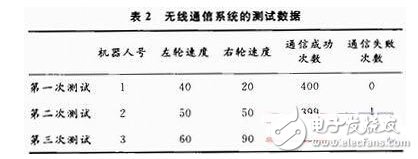
4 实验数据与结果分析
为了测试无线通信子系统的效果。这里做了实验,从发射器发送相同次数(400次)的数据,记录机器人接收到数据正确(通信成功)和错误(通信失败)的次数。实验结果如表2所示,可以看出,通信成功率很高,可靠性很好。
5 结语
本文详细介绍了基于PTR6000通信模块所开发的足球机器人无线通信子系统的设计与实现。实验证明,本设计使机器人小车系统在精度和运行性能方面得到很大提高,可以满足足球机器人对速度、可靠性及抗干扰能力的要求。
- ZigBee在生命子系统中的应用(08-27)
- 基于无线通信技术的图书馆自助服务研究(08-30)
- 数控灯光的短距离无线通信系统方案(10-17)
- UWB无线通信及其关键技术(10-14)
- JPEG2000的近距离无线视频传输系统设计(10-21)
- 无线通信设备用晶体振荡子XRCGD系列(03-15)