汽车前照灯智能化控制的研究
照明系统是汽车主动安全重要组成部分之一,然而灯光光型单一且只能手动控制的传统照明系统存在的巨大的安全隐患,已经无法跟上当前汽车安全技术发展的步伐。因此,如何让汽车传统照明系统更加智能化,消除存在的安全隐患,就成为一个具有重大现实意义的课题。
在现有的汽车照明控制技术基础上,我们提出了一种以弯道随动转弯、车身俯仰车灯调整、光线不足车灯自动开启补足为基本功能的汽车智能照明系统控制方案。与以往的技术相比,引入了模糊控制技术对随动转弯功能进行控制,使该功能模块更加智能化。
汽车前照灯系统智能化的基本功能
1 弯道随动转弯照明功能
如图1所示,传统前照灯的光线因为和车辆行驶方向保持着一致,所以不可避免地存在照明的暗区。一旦在弯道上存在障碍物,极易因为司机对其准备不足,引发交通事故。前照灯随动转弯照明的具体做法就是:在进入弯道时,车辆产生如图2所示的偏转光型,提供以足够的照明。
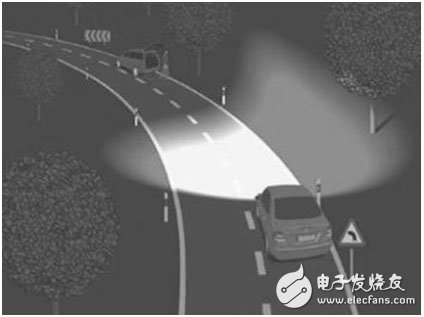
图1 传统前灯的弯道照明问题

图2 随动前照灯的弯道偏转照明
2 阴雨天气或者光照不足条件下的照明
如图3所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。前照灯有效的解决方法是:前灯发出如图4所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。同时,在隧道或者山区等光照强度不够的环境下,能够根据实际情况自动开启前照明,补足光照强度并在光照强度恢复后自动关闭。
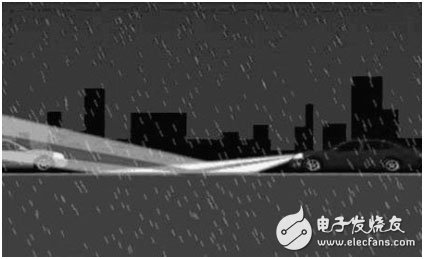
图3 雨天积水反射的前照灯光线(侧视)
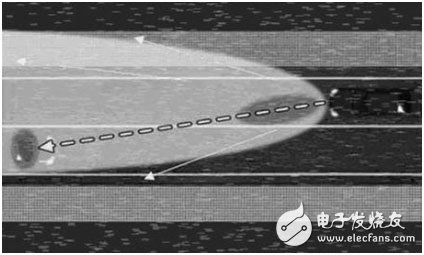
图4 雨天积水前照灯特殊光型光线的反射(俯视)
3车身俯仰情况下的照明
车辆在行驶过程中会因为车身前后负载的不同,改变车身纵倾的角度,安装在车身上的车灯射出光线的角度也会随之发生变化,对夜间行车安全产生不利的影响。如图5所示,上部是正常的前灯出射角度和照明范围,中下部分别是后倾和前倾情况下的前灯角度和照明范围,其差异是非常明显的。调整的具体做法就是:根据车身倾角传感器检测到的角度反方向调整车灯垂直方向的偏转角,保证汽车行驶过程中有足够的照明距离。
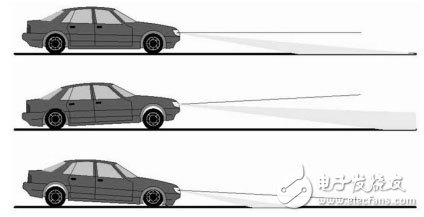
图5 现有前照灯在车身俯仰情况下照明的问题
- 高层建筑物的防雷技术分析(10-19)
- 白光LED路灯充电器电路设计(01-05)
- 补2.0的课 普及3.0,中国工业4.0还很远呢(02-18)
- 智能化与物联网的大潮中,FRAM助力三表设计新突破(06-19)
- 如何利用MCU实现电源智能化(05-03)
- 矩阵式 LED 调光器助力实现色彩鲜艳亮丽的 LED 灯(08-15)