CAN总线+单片机实现通信网络设计
,AT89C55与RS-485总线接口电路及AT89C55与CAN总线物理层专用接口电路的对比连接图如图2所示。
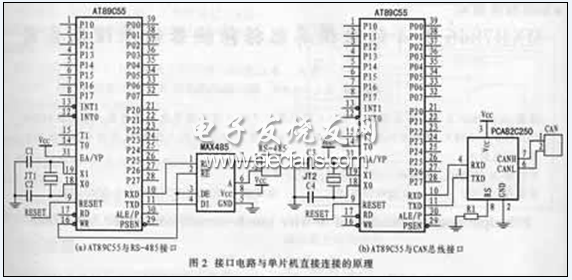
由图2的对比中可以看出,PCA82C250与AT89C55的硬件连接比MAX485与AT89C55的硬件连接还要简单,因为,PCA82C250的通信过程无需接收与发送的硬件转换控制,仅由软件来控制接浮时,CAN总线表现为"隐性"位数值,即CANH和CANL为悬浮态(VCAHN≈CANL≈VCC/2,相当于关闭总线),这为具有"休眠"功能的系统提供了网络安全保障;当TXD端输入为低电平时,CAN总线表现为"显性"位数值(向总线传送有效数据位),即CANH输出高电压(约3.5V,当VCC为5V时)、CANL输出低电平(约1.5V,当Vcc为5V时)。显然,在多主机条件下,"显性"位和"隐性"位的引入,可在总线上实现非破坏性总线仲裁,以裁决哪一个主设备应是下一个占有总线的设备。由于没有用到PCA82C250参考电压的输出值,因此,PCA82C250的5脚可悬空,而8脚所接的电阻RS用于控制CAN总线的输出脉冲的上升、下降沿的斜率,以降低总线的射频干扰。当RS上的电阻大于0.75CC时,PCA82C250芯片进入低功耗待机状态;当RS上的电压小于0.3Vcc时,PCA82C250进入高速通信状态;当RS上的电压处于0.4Vcc至0.6Vcc之间时,PCA82C250进入CAN总线输出脉冲上升、下降沿的斜率控制通信状态,其斜率大小与RS上的电压成正比。
图2中,二个通信系统的软件几乎相同。当采用PCA82C250的作为总线接口替代原有的MAX485时,在软件上所做的变更有:首先,可取消RS-485总线的通信方向控制指令部分,因为CA7402097N总线接口已不需要此功能;其次,RS-485总线在总线发送时,由于发送、接收控制端已连接在一起,即自动关闭了总线数据接收功能,而CAN总线接口在总线数据发送的同时也在进行总线数据的接收(CAN总线接口不提供通信接收、发送数据的分离控制功能),因此,在软件设计上对此应有所考虑。当然,这为多机通信系统中的总线数据冲突的软件识别与仲裁提供了条件。
当需要MCU与通信网络之间的电气隔离时,可在MCU与CAN总线的物理层专用接口电路之间增加2个光电隔离器件(如6N137光电隔离电路),即可实现MCU与通信网络之间的电气隔离。
5 结论
软件上仅做少许修改,甚至不修改原有的RS-485总线的通信软件就能适应新的系统工作。必要时通过修改原有的RS-485总线的通信软件即可实现多主式多机数据通信,充分利用了CAN总线物理层的优势。在硬件方面,能够以简单的形式、较低的价格、较高的性能构造出极具竞争力的分布式测控系统,使多机互连的分布式测控系统的通信网络性能得以提升。
- 电力系统中通信网络的应用研究(12-06)
- GSM-R系统在铁路通信网络中的应用(08-26)
- 基于SNMP的通信网络性能管理模块设计(08-30)
- 移动通信网络云计算的设计(09-20)
- 银行叫号手机排队系统解决方案(03-23)
- 通信网络综合布线的注意事项(02-19)