船载通信天线控制系统的稳定性设计
依据完全不变性原理,当(1+F(S)K2W2)ωf,即F(s)=-1/K2W2时,实现对船摇扰动的完全隔离,即满足这个条件时,不论扰动量ωf为多大,对输出无影响。可是,速度回路K2W2中含有积分环节、惯性环节、二阶环节,如果要实现完全的不变性,必然F(S)中要具有许多个微分环节,这样 F(S)的输出将充满噪声,使系统根本无法工作。但是实现局部的不变性是可能的。即用低阶微分代替高阶微分,并使其系数满足某种条件,从而满足系统精度的要求。
实际使用中,合理选择前馈补偿系数,使前馈回路最大化的消除当前扰动,在此基础上结合环路的跟随能力,有效的消除视轴的偏差,实现高精度跟踪。因此,前馈回路起到粗调节的作用,而位置跟踪回路则可称为精调节。
2.3 工程应用
2.3.1 安装与测量
采用3个速率陀螺测量出因船体摇摆引起的附加在方位轴、横倾轴和俯仰轴方向的速度,用于开环补偿。
俯仰陀螺安装在方位转台上,敏感轴与天线的俯仰轴平行,陀螺随方位轴运动,敏感不到方位轴的旋转、俯仰轴的旋转、船体的航向速率等,它敏感的是船体的横摇、纵摇速率,如式(2)所示,可直接对俯仰轴进行开环前馈补偿。
分析横倾轴的扰动(式(3))和方位轴的扰动(式(4)),无法用一只陀螺直接测量到,可用间接的方法获得。用2只陀螺分别测量cosAωy+s- inAωp和ωh,根据俯仰角E用数学的方法得到式(3)和式(4)。这样,测量ωh分量的速率陀螺安装在方位底座(不随方位轴转动),其敏感轴与方位轴平行,输出主要为船体的航向速率信息。测量cosAωy+sinAωp分量的速率陀螺安装在方位转盘上(随方位轴转动),其敏感轴与横倾轴平行。
2.3.2 测试与分析
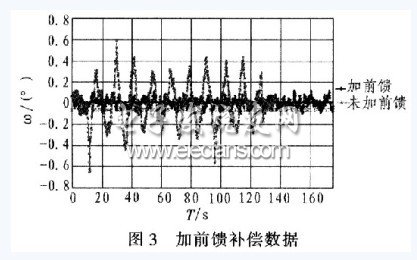
某船载三轴天线控制系统采用抗扰动设计。在海上进行摇摆实验,在典型海况参数(摇摆振幅±6°,摇摆周期12s)下。天线指向卫星自跟踪,转动船的航向,使船升摇时测量俯仰轴的船摇隔离度。这时天线方位角转至90°或270°;测量横倾轴的船摇隔离度,使天线方位角转至0°或180°。隔离度测试结果如图 3所示。图中,曲线系列1表示加前馈跟踪数据;曲线系列2表示无前馈跟踪数据。测试结果为:船摇隔离度为46.4 dB;跟踪精度为0.031°。由以上数据分析,可以得出开环补偿方案完全满足系统设计的性能指标要求。
3 结束语
前馈补偿并未改变原闭环系统的极点和闭环零点。因此,不会影响系统的伺服带宽和稳定性。工程使用时融合了前馈补偿和反馈控制的应用,在保证功能、性能的同时,简化系统、提高设备的可靠性和使用寿命,实际使用效果显著。
- 基于脉冲宽度调制技术的太阳能充电控制系统(10-15)
- 基于SPWM对农用小功率单相变频控制系统的设计(10-30)
- 基于CAN的电源控制系统设计(12-19)
- 地面雷达中远程显示控制系统的实现(08-26)
- DCS及PLC控制系统中PID的运算及应用(08-02)
- 工业交换机在分布式控制系统中的应用(08-02)