采用DSP的半自主远程控制移动机器人系统组成及设计
1 远程控制移动机器人系统组成
系统整体由远程控制平台、无线传输网络以及本地机器人小车三个大部分组成。DSP是本地机器人小车的控制核心。TI公
司的TMS320LF2407A芯片具有改进的哈佛结构体系,采用了流水线技术等优点,而且采用了高性能静态CMOS/技术,把芯片运行电压降低到3.3V,大大减少了芯片的功耗。其CPU具有很高酌处理速度,频率可以达到40 MHz,很多复杂的算法在系统控制中得以实施。此外,它还集成了32 KB闪存、16个脉宽调制(PWM)通道、1个CAN模块,以及1个超高速的500 ns的10位模数转换器(ADC)等功能强大的外设。
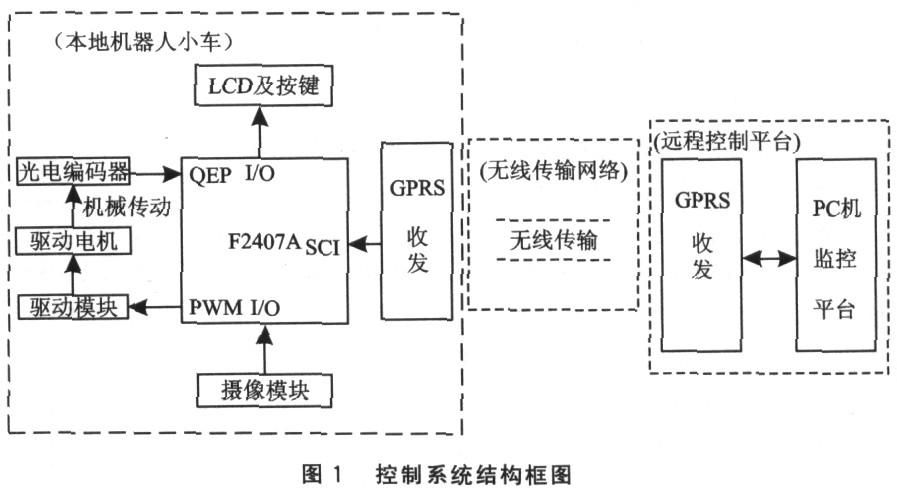
1.1 机器人小车的定位模块

电机控制采用脉宽调制(PWM)的调速方式,并以DSP自带的正交编码脉冲(QEP)电路采集光电编码器的反馈信息,对电机进行闭环PID控制。利用QEP电路捕捉光电编码器的反馈信号可以简化程序的编制,同时采用PID控制原理,可以提高系统的控制精度和稳定性。
电机驱动原理图如图2所示。驱动主芯片为L293B,L293B直流电机驱动芯片允许电压范围在4.5~36V,内有四重推挽(双重H桥集成功放电路)驱动电路,两个通道可以向各自的电机提供l A的驱动电流,并且如果芯片过热,芯片能够自动关断,保障系统不受损坏。当A向、B向为高电平时,则电机A、B电流分别由3脚流向6脚和11脚流向14脚,电机正转;反之,当A向、B向为低电平时,电机电流分别由6脚流向3脚和14脚流向11脚,电机反转。此时,可以用PWM控制芯片上电机使能脚的通断时间比来对电机进行调速,F2407A型DSP芯片支持PWM输出,因此可以很方便地对驱动电机进行调速。
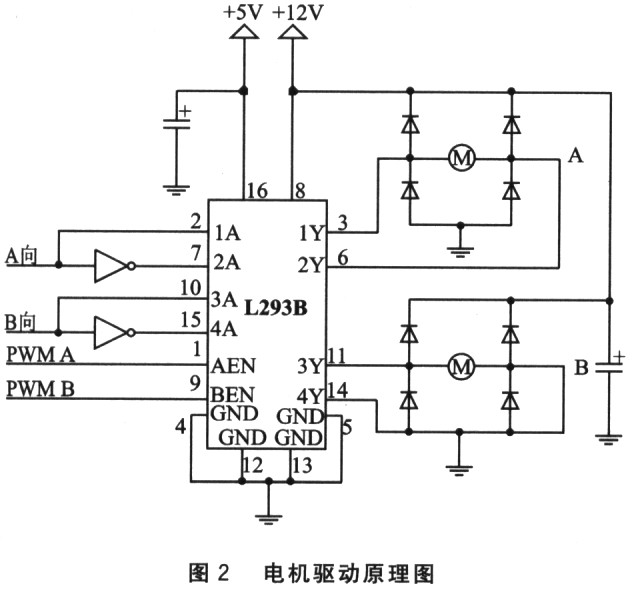
由于DSP芯片自带有正交编码器捕捉模块,因此该部分的电路设计比较简单。光电编码器输出的正交脉冲信号经过非门加以稳定,进入DSP芯片的QEP电路被CPU捕获并识别,再将识别后的信息作为PID控制算法的反馈输入。
LCD显示模块和摄像模块的数据格式都是8位,与单片机等微控制器的接口灵活简单。攝像模块可以输出经压缩后的JPEG格式图像,因此数据量较小,减轻了控制器数据处理的负担,同时缩短了GPRS传输一帧图像的时间,实时性更好。F2407A提供了丰富的I/O接口,用I/O口可以很方便地对LCD模块和摄像模块进行数据的写入和读取。由于LCD模块的数据是写入的,而摄像模块的数据是读出的,因此可以分时复用同一组I/O口,而不会发生冲突。经设计,用不同的控制线分别控制这两个模块的使能端以实现分时复用,均用DSP的I/OPB0~I/OPB7作为它们的数据接口。
2 GPRS无线图像传输
GPRS数据传输的优点是:
◇传输速率高;
◇实时在线;
◇按流量收费;
◇不受距离远近的影响;
◇快捷登录。
2.1 GPRS组网方式
在本系统中,利用GPRS移动通信网络实现信息的双向传输。机器人小车传给远程监控平台的数据主要包括现场图像信息和小车当前定位信息;远程监控平台传给小车的主要是指令信息。
GPRS图像采集模块由采集终端、DSP外围接口、GPR
DSP 相关文章:
- 基于AD73360和TMS320F2812的数据采集系统设计(12-06)
- 基于紫外检测法的智能型特高压验电器系统(03-17)
- 单一DSP控制两套三相逆变器的实现(08-31)
- 基于DSP生成SVPWM在逆变电源中的应用(11-09)
- DSP的大功率开关电源的设计方案(12-01)
- DSP处理器电源方案设计(02-08)