基于锁相环技术的高灵敏车辆探测
1 引言
在十字路口处,为了避免交通阻塞,保证交通安全,规定交通车辆必须按道行驶而不得越道。因此,必须采用相应的感测装置,监控车辆的违规越道行为。目前,对闯红灯行为的记录处理大多是依靠在等待线下安装相应的感测装置,当有车经过时,即刻发出特定信号,系统根据该信号进行判断处理,再通过路口摄像头对违章车辆进行拍照记录。也可采用类似方法探测车辆越道行为,即利用埋入地下的感测装置。但由于感测装置的大小和形状受分道行驶标记线宽度的限制,为了有效探测车辆越道行驶行为,对测量灵敏度提出更高要求。现行方案一般采用单片机测量频率,其灵敏度低,抗干扰能力差,这是因为单片机测量频率在一定时间t内统计脉冲信号数,根据脉冲数的变化反映频率变化。假设传感振荡电路的频率为100 kHz(该值已接近实际应用极限,若再增大振荡频率,将会向外发射能量,对周围产生电磁干扰),如果统计时间t=l ms,则可记录100个脉冲,此时灵敏度的最大理论值能达到1%,但实际上除去不稳定因素的影响,灵敏度不可能太高;如果统计时间延长到10 ms,则灵敏度的最大理论值能达到0.1%,这样不仅影响反映速度,而且实际值也照样打折扣,所以灵敏度仍不能达到实际应用要求。
虽然使用单片机探测车辆也曾有过一些改进方案,但都很难从根本上提高探测灵敏度。为此,提出一种利用锁相环技术提高感测装置灵敏度及抗干扰能力的设计方案。实验证明,该设计方案能够达到实际应用要求。
2 锁相环原理
"锁相"就是相位同步的自动控制。能够完成两个电信号相位同步的自动控制闭环系统叫做锁相环。锁相环广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域。
锁相环(Phase-Locked Loop,简称PLL)主要是由鉴相器(Phase Detector,简称PD)、压控振荡器(Voltage ControlledOsillator简称VCO)、环路滤波器(Loop Filter,简称LF)3部分组成。PD为相位比较装置,用于比较输入信号Ui(t)与VCO的输出信号Uo(t)的相位,产生对应于两个相位差信号的误差电压Ue(t)。LF用于滤除Ue(t)中的高频成分和噪声,以保证环路所要求的性能,增加系统的稳定性。压控振荡器受控制电压Ud(t)的控制,用于将LF的频率向输入信号的频率靠拢,直至消除频差而锁定。
PLL的工作原理是:比较Ui(t)与Uo(t)之间的相位差,产生Ue(t)调整VCO的频率,以达到与Ui(t)同频。在环路开始工作时,如果输入信号频率fi与压控振荡器频率fVCO不同,则因fi与fVCO之间存在固有频率差,而使相位差一直变化,导致PD输出的误差电压UPD在一定范围内变化。在该误差电压的控制下,fVCO也发生变化。若fVCO能够与fi相等,则在满足稳定性条件下应稳定在该频率,稳定后,fUi(t)-fUo(t)=0,相位差不随时间变化,且Ue(t)为固定值,这时环路就进入锁定状态。
3 系统设计
3.1 传感电路
图1给出正弦波振荡电路。它为电容三点式电路,也即考毕兹振荡电路。传感电路用于感应出金属物体的存在。设计中采用已实际应用的涡流传感方法,将埋入地下的探测线圈直接接入正弦振荡电路,即振荡电路输出的频率带有传感信号。
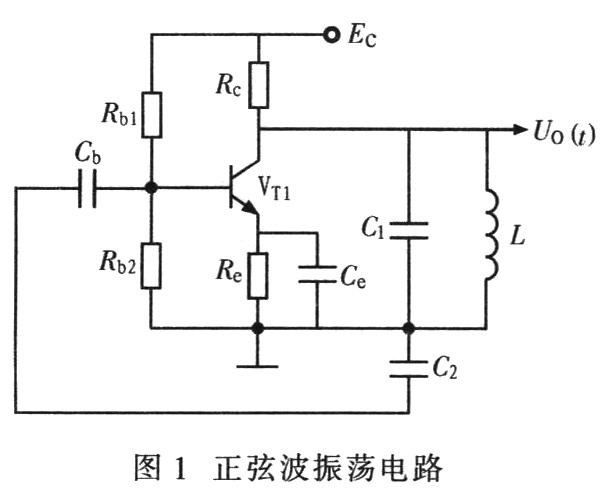
图1电路中:Rbl=Rb2=62 kΩ;Rc=1 kΩ;Re=2.2 kΩ;Ce=Cb=10μF;C1=C2=0.1μF;L为电感线圈,此时晶体管VT1为共射放大组态,工作在放大状态。
系统正常状态下即无车经过时,传感振荡电路的输出信号us(t)为频率保持不变(f=f0)的正弦波。当有车经过时,us(t)的频率变大,即f=f',其频率差为△f=f'-f0,范围大概在几百赫兹到几千赫兹。该电路的振荡频率f为:

由式(1)可见,f与电路中电感L、电容C1,C2有关(C1,C2为固定值),所以f为L的单值函数,当L发生变化时,该振荡电路的振荡频率也发生反方向变化。把地线圈作为L,直接连接到电路中,通过检测电路振荡频率的变化来反映L的变化,从而实现对金属物体的探测。
设正常状态下即无车经过时的输出信号频率为f0,有车经过时的振荡频率为f’,则易获知:f’>f0。由于f’不易通过固定公式直接计算,而只能通过实验法大概估算,而且实际应用中无需知道f’的具体数值,只需估计△f=f’-f0的范围即可。
3.2 探测电路
3.2.1 PLL电路设计
通过检测锁相环判定是否有车辆经过。当车辆移动到埋入地下的线圈上时,传感电路的输出频率发生变化,PLL失锁,通过检测该失锁信号即可得知是否有车越道。因为该探测电路是以相对频率变化而不是绝对频率变化来判断是否有车辆经过,因此具有自我调节能力,不会因为周围的电磁环境改变而失效。
在该设计中P
- 低频数字相位(频率)测量的CPLD实现(05-03)
- 低失真、覆盖三个十倍频程的锁定同步正弦波发生器(11-02)
- 时钟的抖动测量与分析(03-16)
- 基于GPS的恒温晶振频率校准系统的设计与实现(09-18)
- 如何解决照明灯具的测试测量痛点(05-19)
- 基于正交矢量放大的MRS信号采集模块设计---- 采集模块硬件设计(二)(02-27)