为何自动驾驶/无人机/服务机器人都离不开这三种视觉算法
出即是系统的输出。
考虑到camera数据和IMU数据通常是不同步的,因此通过硬件时间戳,需要判断图像数据对应的时间戳与IMU时间戳的关系。在EKF propagate步骤,更高帧率的IMU数据不停的更新EKF的状态。在camera数据到来时,触发EKF update步骤,根据EKF建模方程来更新状态变量、协方差矩阵,并且重新更新所有晚于camera数据的IMU数据对应的状态变量。
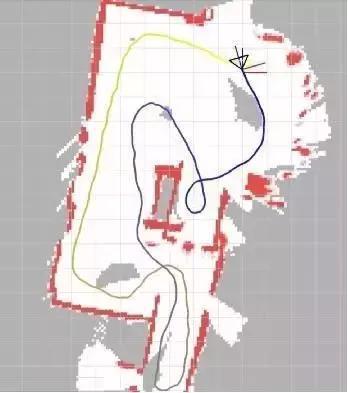
Segway Robot采用了业界领先的视觉惯导定位系统,下面是一个在楼道里面运行一圈,回到原点之后的效果图,具体有如下优势:
1.在大尺度下可以保证非常小的闭环误差
2.实时运行,需求CPU资源小
3.允许快速旋转等情形,不会跟丢
算法三:避障
Q:视觉避障的算法原理是怎样的?
导航解决的问题是引导机器人接近目标。当机器人没有地图的时候,接近目标的方法称为视觉避障技术。避障算法解决的问题是根据视觉传感器的数据,对静态障碍物、动态障碍物实现躲避,但仍维持向目标方向运动,实时自主导航。
避障算法有很多,然而这些方法都有严格的假设,假设障碍物为圆形或假设机器人为圆形,假设机器人可以任意方向运动,s或假设它只能走圆弧路径。然而实际应用上,机器人很难达到条件。比如VFF算法, 该算法假设机器人为点,而且可以任意方向运动。VFH+假设机器人为圆形,通过圆形膨胀障碍物,在考虑运动学问题时仅仅假设机器人以圆弧路径运动。DWA也假设机器人为圆形,在考虑运动学问题时只模拟了前向圆弧运动时的情况。
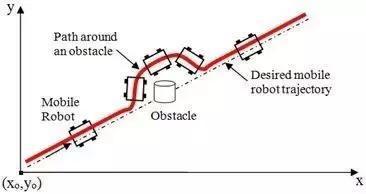
相对而言,我们不限制机器人的形状,考虑运动学问题时,模拟多种运动模型,而不限于圆弧运动,因为这样可以为机器人找到更佳避开障碍物的行为。
这张图显示了使用不同运动学模型导致不同的避障结果。左图表示使用圆弧模型时模拟的路径,右图表示使用另一种路径模型模拟的路径。在这种狭小环境,此方法可以提前预测多个方向的障碍物情况,选择合适的模型可以帮助找到更合适的运动方向躲避障碍物。

和目前常用的避障算法之间存在的差异在于,它将运动学模型抽象化到周围环境地图中,然后就可以使用任何常用的避障算法,这样就解耦了运动学模型与算法的捆绑,而且任何要求严格的避障算法都能加入进来。Segway Robot的避障系统,综合了深度传感器,超声波,IMU等sensor。在复杂的环境中,可以自如躲避障碍物。

这张图是我们的避障系统的一个截图,可以看到深度图和2维的避障地图。最下面红色的指针就代表了每时每刻避障的决策。
精彩问答
Q:为什么选用ir相机而不是传统的rgb相机呢?ir相机相对来讲的优势在哪里?
A:ir相机可以看到人眼看不到的物体,比如深度相机需要在室内投射红外纹理,帮助深度识别。人眼看不到,但ir相机可以看。
Q:现在机器人导航是否主要是slam技术,还有没其他导航技术?主要流行的slam技术有哪些?用于无人驾驶和无人机的视觉导航技术有哪些异同?
A:slam技术是导航中的一个基础模块,种类很多,有单目,双目,depth,imu+视觉等传感器为基础的算法。双目相机可以很好的适应室内和室外的环境。他的体积其实非常小,segway robot使用的camera长度在10cm左右
Q:现在有无用于机器人导航的导航地图存在,类似车载导航地图?用于机器人导航的地图数据有哪些?
A:现在还没有这样的机器人导航地图存在,但是是研发热点。比如tesla和mobileye的地图之争。
- 新颖固体图像传感器的发展及应用(07-26)
- 机器视觉在电子行业中的应用(11-03)
- FIGLA超声波感应全自动清扫机器人(11-11)
- 基于行为的智能吸尘机器人设计(01-10)
- 机器人、四轴飞行器7个制作实例解析(制作步骤、电路图、源代码、演示视频)(05-24)
- 十几款创意机器人制作热推,呆萌炫酷通通有!(06-09)