Turn Key解决方案:汽车车牌定位识别系统的设计实现
噪模块是通过对图像进行中值滤波实现的,图4-4为其硬件框图。图4-3为一个3×3的滤波模板,不同的模板即可得到不同的滤波效果。如图4-4所示,采用移位寄存器对图像数据缓存输出,将图像数据和模板进行并行一维卷积即可得到三个卷积结果,输入加法器即可得到滤波结果,其中buffer的大小为图像的列数。
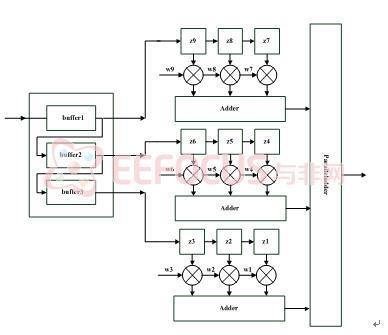
图4-3 卷积模板 图4-4 中值滤波硬件框图
4.1.4 灰度拉伸模块
图4-5即为灰度拉伸模块的硬件框图,像素值与阈值进行比较,若像素值较大则输出为1,否则输出为0。多选器根据两个比较器的输出来选择输入,其输出即为灰度拉伸后的灰度值。
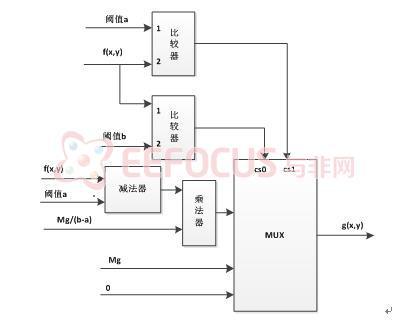
图4-5 灰度拉伸模块硬件框图
4.1.5 Sobel边缘检测模块
与中值滤波类似,Sobel边缘检测也是由图像数据与一个模板卷积实现的,其卷积模板称为Sobel算子。图4-6为Sobel边缘检测模块的硬件框图,其实现方式与图4-4类似。
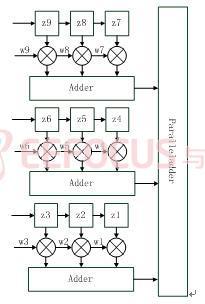
图4-6 Sobel边缘检测模块硬件框图
4.1.6 牌照区域搜索模块
图4-7为牌照区域搜索模块的硬件实现框图,它分为行扫描确定车牌上下边界和列扫描确定车牌左右边界两部分。图4-7左半部分电路为上下边界确定电路,跳变点检测模块检测每行的跳变点个数,并对其进行累加,每行扫描完成后将跳变点个数输入比较器与阈值做比较,若大于阈值则为车牌区域,否则为非车牌区域,由此确定车牌区域的上下边界;图4-7右半部分为左右边界确定电路,左跳变起始点检测模块负责自左往右检测第一个跳变点,检测到即将该跳变点所在列存入左边界RAM,确定车牌区域左边界,右边界确定方法类似。
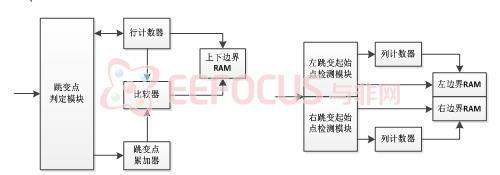
图4-7 牌照区域搜索模块硬件框图
4.1.7 候选区域判别模块
候选区域判别模块是在上一步搜索的不止一个候选区域中判别出真正的车牌区域,其硬件框图如图4-8所示。长宽比例计算模块负责计算出每个候选区域的长宽比例,然后与已知的车牌区域长宽比例进行比较即可获得真正的车牌区域。
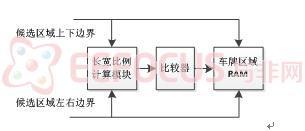
图4-8 候选区域判别模块硬件框图
4.1.8 字符分割模块
图4-9为字符分割模块的硬件框图。首先,车牌定位出来的车牌区域图像输入一个比较器进行二值化,再经过几何变换模块进行形状矫正,然后垂直投影、上轮廓检测和下轮廓检测三个模块并行地对其进行处理获得三组分割点,然后根据这三组分割点的相互关系判定出一组正确的分割点。
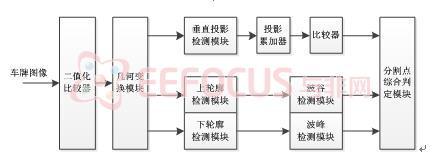
图4-9 字符分割模块硬件框图
4.2 所需开发平台及其它资源
本设计方案中,FPGA负责完成实时的高速数字信号处理、视频解码芯片控制、数据传输和存储等任务,这需要足够多的存储器和逻辑资源以及足够快的时钟频率。为了保证本方案顺利完成,需要向大赛组委会申请Nexys™3 Spartan-6 FPGA Board。另外,本方案还需要CCD摄像头和视频解码芯片等完成视频信号的实时采集。
五、附录
本算法设计方案得到的仿真结果如下所示。

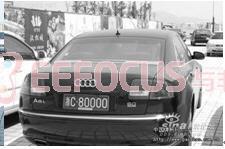
图6-1 原始RGB图像 图6-2 灰度图像
图6-3 去噪图像 图6-4 边缘检测结果

图6-5 确定上下边界的车牌区域


图6-6 定位的车牌区域 图6-7 二值化后的车牌区域

图6-8 车牌字符分割结果
车牌定位识别 FPGA 图像采集 MicroBlaze 相关文章:
- FPGA技术在汽车电子中的应用(11-26)
- 电源分配结构的三大转变为电源管理技术开创新局面(01-10)
- 利用FPGA协处理器优化汽车信息娱乐和信息通讯系统设计(01-24)
- 如何利用可编程器件设计车用显示系统(08-30)
- 基于SoPC的汽车安全监控系统设计(07-09)
- FPGA在汽车ECU领域大有可为(08-14)