辅助驾驶:汽车环视系统设计,完整硬件平台参考方案
(1)当该列中梯度最大值的点有2个或2个以上时,取距离图像水平中线距离最近的点作为该列的特征点。
(2)当2个点距离图像水平中线距离相等时,取上方的点作为该列的特征点。
在图像的采集过程中,相机不会在一个绝对的水平面上运动,倾斜、抖动等现象不可避免。另外,景物中物体的运动和光线的变化也时常发生,这样会使某些列中梯度最大点在2幅图像中有很大出入,数据的抖动性比较大。为消除这种干扰,可以采用中值滤波的方法过滤掉这样的点,使对数组的判断更具可靠性。利用长度为7的一维窗口对2个数组进行中值滤波。
2幅图像有相似的部分,则上面的2个数组中必有一部分,它们的差数组具有很好的稳定性,即差数组的方差具有局部最小的性质,这样就可以找到2幅图像的位置关系。
由于2幅图像的重叠部分一般不超过1/3,为减小计算量,只在左图像的2/3以后的部分和右图像的1/3之前的部分中进行计算,接下来确定全局最小方差的两段子数组。这两段数组的起始位置就是2幅图像的最佳匹配点。
在代表左、右图像的两个数组中分别取一固定长度L的子数组,记为 和
和 。L的选取可视图像的宽度而定,一般L的取为图像宽度的1/10左右会得到较好的效果。
。L的选取可视图像的宽度而定,一般L的取为图像宽度的1/10左右会得到较好的效果。 和
和 的相似程度
的相似程度 由
由 的方差来描述,即
的方差来描述,即
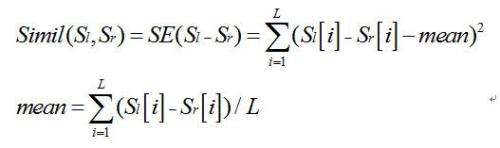
其中方差越小,说明Sl和Sr越相似。那么,必然可以找到这样的 和
和 ,使得:
,使得:

2幅图像的最佳匹配位置就是 和
和 的起始位置。由于
的起始位置。由于 和
和 的元素值是按列梯度最大点的纵坐标取值,在确定了列的匹配位置时,也同时确定了行的匹配位置。这样就可以找到最佳的匹配位置。
的元素值是按列梯度最大点的纵坐标取值,在确定了列的匹配位置时,也同时确定了行的匹配位置。这样就可以找到最佳的匹配位置。
六 软件设计
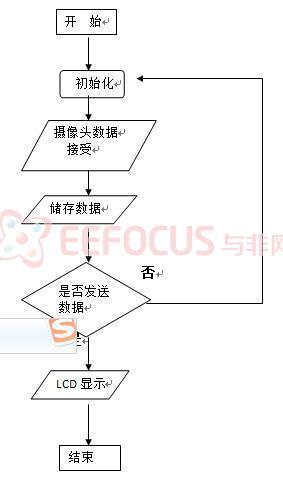
本项目涉及关键技术有:实时数字图像快速处理;图像传感器技术;图像显示加速;多场景、多视点图像几何处理及其合成拼接成像技术;高性能处理平台设计;车载数字图象技术研究等。软件流程如下图所示。
汽车环视系统 FPGA AVM 辅助驾驶 Spartan-6 相关文章:
- FPGA技术在汽车电子中的应用(11-26)
- 电源分配结构的三大转变为电源管理技术开创新局面(01-10)
- 利用FPGA协处理器优化汽车信息娱乐和信息通讯系统设计(01-24)
- 如何利用可编程器件设计车用显示系统(08-30)
- 基于SoPC的汽车安全监控系统设计(07-09)
- FPGA在汽车ECU领域大有可为(08-14)