使用虚拟原型评估基于MOST的先进驾驶辅助系统
高效的通信网络是分布式先进驾驶辅助系统(ADAS)的主要组成部分。分析在不同系统参数下的不同场景中的这类系统是一项非常复杂的任务。在早期设计阶段评估关键系统参数以实现最佳系统行为非常重要。本文将讨论一种基于虚拟原型的评估架构,它可以用来评估基于MOST的先进驾驶辅助系统。
汽车中先进驾驶辅助系统(ADAS)的数量在不断增加。这些系统处理来自多种传感器的信息,比如雷达传感器、摄像机或全球定位系统(GPS),然后为驾驶提供帮助。因为这些传感器在全车各个地方都有分布,因此需要一个高效的数据通信网络来共享不同ADAS之间的信息。另外,这些系统经常要求诸如快速傅里叶变换或霍夫变换等处理算法。拥有一个专门的预处理节点执行这种通用任务是有好处的,这种节点可以采用最优化的硬件架构。不过这会提高对分布式ADAS网络的要求。通过优化通信网络可以减少布线的数量。MOST通信网络可以提供这类任务所需的许多功能。
MOST网络技术可以提供种类繁多的配置方案。为了找到最优的解决方案,必须对这些方案进行评估,并且最好是在早期设计阶段完成。为了支持这些评估,本文推荐一种基于虚拟原型的评估架构。它能减少这种基于网络的分布式应用的评估复杂性。
评估架构--ADAS使用案例
本文讨论的评估架构支持功能和时序验证、性能和可靠性分析,并支持设计空间开发。架构的主要关注点之一是模块化特性以及可用于分析各种不同系统方案的通用方法。基于虚拟原型的架构是由众多的基本模块构建的。这些模块汇聚起来形成想要的系统,比如ADAS用例就是用大约150个模块实例组装而成的。功能提取如图1所示。这种方案能够方便地改变系统,例如只需用合适的模块替换或扩展现有系统就能改变通信通道。借助这种方法可以很容易地使用已有的IP组件集成新的应用。虚拟系统是用XML文件配置的,因此能够在运行时期间方便地完成模块的组装和配置。
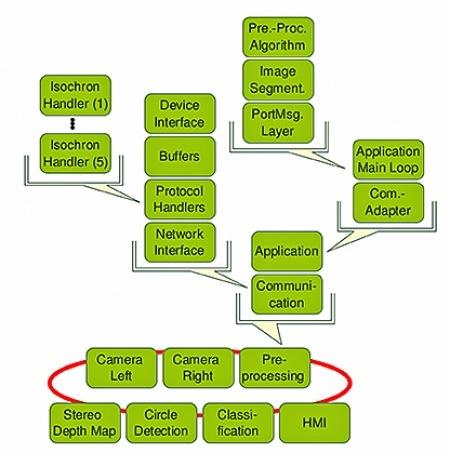
图1:虚拟原型的模块化结构
分布式ADAS用例包含:
。两个摄像机
。一个预处理器模块
。一个圆周检测模块
。一个速度标志分类模块
。一个立体深度图计算模块
。一个人机界面(HMI)
系统包含两个ADAS功能:立体深度图(SDM)和交通标志识别(TSR)。这两个系统功能共享公共的摄像机和图像预处理模块。通信网络必须转发多种不同的图像流,包括原始摄像图像,预处理后的图像,检测到的圆周剪辑,立体深度图或分类的速度值。根据模块所发挥的作用,对基本通信网络的要求是不同的。举例来说,预处理模块要求1至n的通信组合来应对多个接收器。摄像机图像流提供连续的数据流。另一方面,剪辑过的交通标志以突发的方式出现。为了揭示这种通信技术的影响,需要详细分析立体深度图应用的摄像机数据流。
通信技术对应用的影响
立体深度图的计算需要同步发送两个预处理后的摄像机图像。如果图像没有与诸如顺序号等额外信息取得关联,那么接收缓冲器就有必要包含连续同步的摄像机图像。因此,通信网络必须确保左右摄像机图像在两次顺序读取操作之间总能成对发送。不同种类的通信网络可能会影响到这种行为。由于比如具有不确定性访问行为的共享通信通道而存在置换的可能性。不同通道类型或通道的使用可能导致不同的时延,进而导致使用老的图像实例。
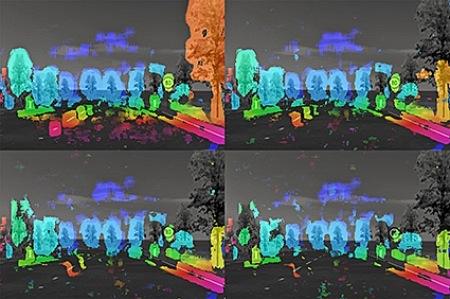
图2:左右摄像机图像之间存在置换时的立体深度图(a)没有置换(b)一帧(c)两帧(d)三帧置换
图2显示了左右摄像机图像之间存在不同置换时的立体深度图。近的物体显示为从红色开始的暖色调,远的物体显示为冷色调,如蓝色。物体越近,颜色越暖,反之亦然。图中的左上角是左右图像同步的结果图像。从图中可以看到前面的树(图像的右边角落)被很好地检测到。在右上方的图像中,左右摄像机之间引入了一帧的置换。深度信息没有覆盖完整的树。在右下的图像中,插入了三帧的置换。从图中可以看到,树几乎没有检测出来,有关距离的信息也出现了差异。
MOST的同步通道是最适合完成上述任务的通道。它能提供具有确定性时延的非共享通道。由于是连续的图像流,带宽是一定要分配的。这种通道的最大好处是允许1至n的通信,因而预处理器件和HMI都能接收摄像机图像,并利用深度信息计算重叠。
系统参数的优化
可以根据实际使用情况用虚拟原型确定最优的配置参数。ADAS场合中最重要的缓冲器位于MOST器件和应用之间,如图1所示。缓冲器被分为接收和发送缓冲器。接收缓冲器的使用被用作例子。模拟INIC基本行为的MOST数据处理器从MOST帧提取/向MOST帧写入数据。读取的数据每隔20.833?s存储到接收缓冲器中。在应用侧,以应用中断速率读取缓冲器。为了避免缓冲器溢出和随之而来的数据丢失或重传,必须平衡这些读写访问。在虚拟原型中,可以很容易地监视缓冲器的使用,例如使用不同的应用中断速率,或影响帧使用的各种业务情景。
数据包通道共享应用的评估
虚拟原型的巨大潜力在于能够分析依赖于各种参数的数据业务。评估架构允许捕获、监视、比较和分析不同节点处的数据,如应用发送和接收的数据,数据处理器,不同类型的缓冲器或MOST总线自身上的数据。用户可以在配置文件中方便地定义数据访问点,从而允许用户分析整个系统行为。
下面的使用案例分析了共享数据包通道的两个应用的行为。在TSR场合,剪辑后的图像通过数据包通道传送,因为没有必要采用固定的带宽分配。这种场合可以评估额外连接的影响。第一个连接基于MOST高协议(MHP),第二个连接基于MOST以太网协议(MEP)之上的TCP/IP.MHP是通过封装源自NetServices的协议实现的,TCP/IP协议则是通过封装开源lwIP--轻量级TCP/IP栈实现的。

图3:使用不同工具评估TCP/IP和MHP数据连接
图3显示了一个发送器和一个接收器场合下所产生的跟踪数据的提取。最底下的图显示了共享接收缓冲器中的四次缓冲器溢出。倒数第二张图显示了以字节为单位的缓冲器使用情况。中间两张图分别显示了用比如圆周检测、(MHPOutNode01)发送的数据以及用比如接收器HMI(MHPInNode00)接收的数据。从图中可以看出由于缓冲器溢出而丢失了两个消息(图中用红色圆圈标志),并且MHP在块末尾重传了数据。为了验证行为的正确性,可以用OptoLyzer工具套件额外地观察MHP业务轨迹。如图所示,MHP通过发送MultipleFramRequest来重传0x02和0x09帧。
最上面两张图显示了由MEP通信完成的数据交换。为了分析这些通信,使用了开源数据包分析仪Wireshark.在提交的使用案例中可以看出,TCP/IP重传超时(由第三个缓冲器溢出引起的丢帧触发)时间长度足够MHP连接发送一个完整的数据集。这个简单例子展示了如何使用评估架构详细地观察系统行为。借助到已有分析工具的链接,可以实现虚拟原型方法的完整集成。
- 联网标准让车载视频娱乐和信息系统成为可能(02-22)
- 基于当今数字信号处理器的新一代车载娱乐系统(03-07)
- MOST总线技术(03-09)
- MOST—汽车电子信息娱乐系统的高速数据总线(05-01)
- 基于数字信号处理器的新一代车载娱乐系统解决方案(01-13)
- 如何用手机实现CAN网络的监控?(07-21)