DLP技术:实现新一代汽车抬头显示系统
引言
德州仪器DLP投影技术是一项被广泛使用的成熟技术,用于多种显示应用,包括:手持投影机、会议室和数字影院。DLP技术可满足先进的HUD系统的需求。DLP电子系统可支持视频处理和格式化,满足需要图形和视频图像的未来HUD系统的需求。高动态范围LED控制系统的概念已被证明可提供在白昼和黑夜观看的条件。此外,借助基于DLP技术的光学设计实施,相关人员可更加灵活地解决未来汽车HUD系统的光学设计难题、外形规格限制以及热负荷管理等问题。
DLP电子系统概述
DLP汽车抬头显示系统的概念包含两个子系统,即利用DLP控制器芯片的视频处理和格式化子系统,以及利用Piccolo微控制器(MCU)的LED控制系统。图1展示了一个典型的DLP抬头显示系统应用。
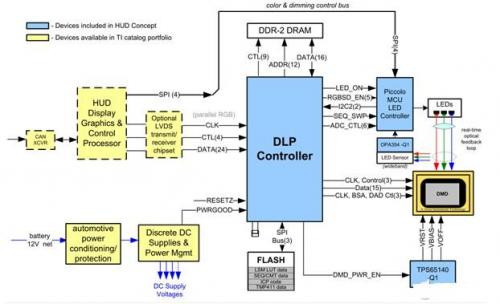
图1.典型的DLP抬头显示系统应用
DLP HUD控制器负责接收和处理从外部显示图形处理器接收到的视频和命令,它能够接收24位并行视频数据,其帧速率高达60Hz.所接收的视频数据经过可编程图像缩放、灰度、子图像支持以及边框调整因素等处理后,最终数字输出给DMD,以呈现最终图形显示。此外,DLP HUD控制器还提供启动红色、绿色和蓝色LED的频闪信号,与DMD器件上正在显示的数据保持同步,从而呈现高亮度、高度饱和色彩和具有极快显示速率的高对比度图形。
基于Piccolo MCU的LED控制系统负责精确控制整个工作温度范围以及红色、绿色和蓝色LED的老化范围内的色彩和亮度。此外,它还支持高动态亮度的自然调光,适用于HUD应用的白天和夜间驾驶情况。
LED控制系统采用基于PWM滞后控制方法的光通量反馈方案。在连续模式(CM)中,整个输出LED使能脉冲时段都以近直流电(DC)方式开启LED光源,持续保持固定的光照水平。在断续模式(DM)中,每个脉冲幅度由相同的滞后控制环路控制,但只能启用已触发的脉冲光源。DLP控制器可计量每个LED具体的脉冲数量。断续模式在保证控制精度的同时,允许采用极低的输出通量水平。
LED温度升高和LED老化将导致要用更高的电流电平才能产生所需的光通量水平。当光通量控制环路达到所需的光通量水平之前就已达到最大的LED电流时,Piccolo MCU会感知到这种情况,并相应地按比例降低所有3个LED通量水平,直到所有LED返回到光通量反馈控制之下。通过这种方式,该系统可在LED的整个使用寿命提供最佳图片,并实现终极亮度水平。
LED控制系统通过SPI总线输入接收来自上行控制光源的亮度/调光控制命令。Piccolo解析LED控制系统的命令,如RGB LED振幅电平、连续或断续模式,并通过专用I2C总线配置DLP控制器。
DLP电子系统基于汽车级元件,该元件可实现HUD系统操作所需的全部功能。该电子系统包括视频处理和LED控制系统,支持适用于白天和夜间驾驶情况的高动态调光范围。
高动态范围LED控制系统概念
HUD应用对动态范围要求非常高,在白天运行时支持的亮度要超过15000 cd/m^2,而在光线非常暗的夜间环境中,显示图形的亮度不能低于3 cd/m^2.HUD系统必须能够在目标白点处保持全色深的图形,并且动态范围需超过5000:1.LED驱动器控制系统专为汽车HUD应用而开发,已经展示了全系列的功能。
采用Piccolo MCU的LED驱动器控制系统,可管理红色、绿色和蓝色LED调幅,保持正常的白点,并同步LED照明和DLP控制器。DLP控制器为DMD和相关的RGB LED使能信号提供高速数据。LED驱动器控制电路选用的每个器件都能采用符合汽车标准的德州仪器Q1(专为汽车而设计)元件。
DLP投影系统采用脉宽调制(PWM)的红、绿和蓝光打造全色深图形,在所用的标准PWM技术内集成并同步调光功能。
该系统采用基于LED光线输出的光学滞后反馈,为了获得更高的亮度,在位段内的时段采用连续反馈模式保持稳定状态的振幅。该示例如图2所示。连续模式反馈已经证明可在100:1调光范围工作。
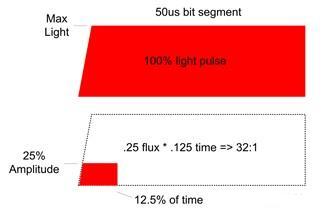
图2.连续调光模式
该系统还采用了断续模式反馈来生成少量脉冲光。该技术可将动态范围扩展至超过5000:1的比例。图3显示了断续模式光脉冲示例。
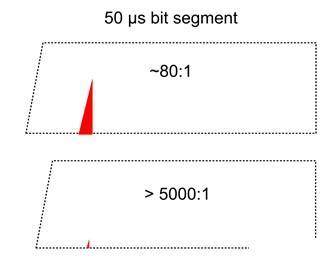
图3.断续调光模式
LED控制系统可采用连续和断续操作模式,展示从15000 cd/m^2至低于3 cd/m^2的范围内的自然调光。德州仪器概念系统中的已测数据如图4所示。
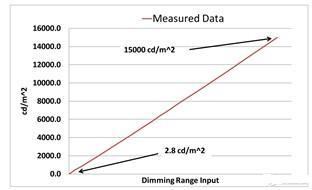
图4.德州仪器概念系统的已测白光
除了实现较大动态范围外,还须保持白点。为了在德州仪器概念系统中实施,我们选择D65为目标白点,D65是大部分高清电视(HDTV)所采用的标准。此白点的目标色度值为x=0.313、y=0.329.如图5和6所示,动态范围内的已测数据保持接近目标白点,离目标色度点的总偏差不小于+/- 0.01.
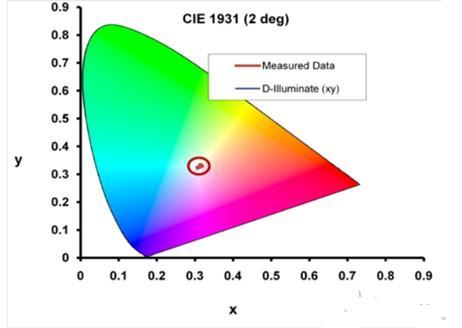
图5.德州仪器概念系统的已测白点
DLP 抬头显示系统 Piccolo LED HUD 相关文章:
- 再论车载平视显示(10-30)
- 基于超声波检测的倒车雷达设计(11-28)
- 另类传感器观念:汽车传感器(11-30)
- RGB色彩传感器工作原理及应用方案分析(上)(01-04)
- RGB色彩传感器工作原理及应用方案分析(下)(01-04)
- 凌特LT3474 LED驱动器利用汽车电源给高亮度LED供电(01-12)