详解基于CAN总线的汽车仪表系统—芯片选型与电路设计
偶数字节,从而提高了代码效率。CPU12的指令队列逻辑和微代码使对齐的和非对齐的指令执行时间完全相同。
4.片内集成128KB的闪速存储器(FLASH)和 6KBRAM及ZKB的EZPRoM。近年来,随着闪速存储器在微控制器片内的应用走向成熟,微控制器的开发、应用又迎来了一次新的飞跃。FLASH是一种非易失性存储介质,读取它的内容同RAM的读取一样方便,而对它的写操作却比EZPROM还要快。同时,在系统掉电后,FLASH中的内容仍能可靠保持不变。FLASH的主要优点是结构简单、集成密度大、成本低。由于FLASH可以局部擦除,且写入、擦除次数可达数万次以上,从而使开发微控制器不再需要昂贵的仿真器。6KB的RAM使得CPU能适应大多数中高级系统的需求。
5.应用锁相技术提高了系统的电磁兼容性在以往不使用锁相环的微控制器应用系统中,晶振电路由于其工作频率比较高(通常为几兆赫兹至几十兆赫兹)而成为一个很大的干扰源,这一问题给系统设计、线路板布局带来了很多不便。MCgs12的时钟发生系统中巧妙地使用了锁相技术,因而可在外接几十千赫的外部晶振情况下,通过软件编程产生几兆的系统时钟,从而降低了对外辐射干扰,提高了系统的稳定性。
6.模糊运算指令:HCS12CPU中有特殊的四条模糊逻辑指令,利用他们可以计算隶属度函数、加权或非加权的规则推理以及用于加权平均解模糊算法的输出求和、权值求和。利用这些指令,可以在大约50个字节代码长度内构成一个完整的模糊推理核心,执行时间仅60us(16MHz晶振)。
7.背景开发模式:简单的背景开发模式(使用在线仿真器或评估板)使得开发成本进一步降低,也使得现场开发和系统升级变得比较方便。
8.硬件断点:如果程序位于ROM中,调试过程需要使用硬件断点逻辑。HCS12可以提供两个普通断点,或者一个包括16位地址、16位数据及读写信号的条件断点。断点处理方案包括在匹配地址前停止CPU或者产生软件中断SWI。双地址断点模式下,通过SWI可以为ROM中的程序作两个软件补丁。
例如在初始化阶段对断点逻辑进行设置,使它在遇到错误地址时产生SWI,SWI服务历程可以调用安排在EEPROM中的补丁程序,替代受损的指令序列,最后跳转到错误指令序列后面继续运行。
H128集成了丰富的外围资源除包括闪速存储器FLASH和内部RAM以外,该芯片还集成多种功能模块。其各功能模块分别与外围电路接口对应,每个功能模块都对应一个系统功能需求,并与外围电路和元器件相对应,是选型的重要参考因素。主要集成的功能模块:
》26位的epuzZ内核 (starCore);
》单线BDM调试模块;
》具有可选16位或8位总线扩展能力;
》集成CAN控制器,带2路CAN控制接口,支持CAN2.OA旧协议;
》’8路10位精度的习D转换通道;
》2路PWM(脉宽调制)输出;
》6KB的RAM,128KB的FLASH,ZKB的片内EEPROM;
》内部集成的供单片机核心部分工作的SV电源;
》丰富的刀O资源,最多可利用的刀0引脚达61个;
》16位主计数器,7位分频计数器;
》可驱动32个前极和4个背极LCD;
》包括同步串行设备接口(SPI)和一步串行通信接口(Scl);
》6路步进电机驱动模块。
4.1.1MSCAN控制器
H128片内具有可扩展的控制器区域网络MSCAN(Motorolascalablecontrofler areanetwort)模块,是为16位MCU设计的通用CAN通信模块,它和CAN2.0川2.0B完全兼容,实现CAN控制器的功能。MSCAN控制器和发动机、变速箱等底盘动力传动装置的CAN总线节点相连,实现CAN总线数据的接收与发送工作卿l。H128中有两路CAN总线接口,分别为RXCANO、TXCANO和RXCANI、TXCANI。其中CANO口可定义为CAN通信接口,也可定义为J1850通信接口,CANI除了定义为cAN端口外也可定义为IZc端口。双路CAN接口使得仪表不仅作为CAN总线上的一个节点,同样也可以作为一个中继器,实现不同网络协议之间的互连。MSCAN模块结构图如 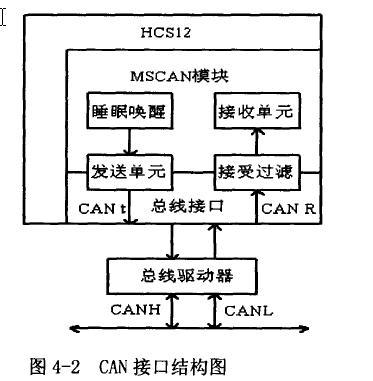 。
。
MSCAN模块具有如下特点:
1)模块化设计结构;
2)符合CAN2.OA/B标准:支持标准帧和扩展数据帧,最多8个BYTE的数据长度,支持远程请求帧,高达IMbps的可编程通信速率;
3)4个具有先进先出FIFO(first· infirstout)结构的缓冲区;
4)3个具有局部优先级的发送器;
5)灵活设置可屏蔽标识符 (maskableidentifierfilter)的工作方式,可以配置2个32位过滤码(适用于扩展模式)、4个16位过滤码或6个8位过滤码;
6)具有内置低通滤波的远端唤醒功能;
7)可编程为方便调试的自环工作模式,即自发、自收;
8)MSCAN模块提供了使用方便的自钡叮模式,用户可以在不加任何外围电路的情况下,是CAN的发送和接收两个引脚在芯片内部相连,用户可以编程测试CAN模块的正常使用。MSCAN模块通过引脚CANT和CANR和驱动器连接,在 CAN总线上,CANT输出引脚代表的CAN总线上的逻辑电平,0表示显性状态,输出1表示隐性状态。
4.1.A/D转换模块
- 胎压监测系统(TPMS)技术与设计考虑(11-26)
- 利用先进的MCU技术实现电机高效率控制(01-10)
- 基于MCU和DSP的步进电机控制技术(01-10)
- 车载液晶电视/显示器专用MCU及设计方案(01-11)
- 用MCU来控制蓝牙GPS模块 (07-06)
- 如何解决汽车车身控制设计的三大挑战 (09-29)