基于ARM和ADIS16355的汽车二自由度数据采集系统
把杂波滤掉,得到相对准确的数据。为此设计汽车怠速与正常运行两种模式。汽车在怠速状态下,由于汽车是相对静止状态,理论上测到的汽车横摆角速度与侧向加速度为0,然而由于存在其他的干扰因素,因而实际测得的数据并不为0.通过对测试数据的分析可以得到干扰源的类型,从而根据干扰类型而设计出相应的滤波方式。下面分别就汽车的怠速模式与正常运行模式两种运动方式具体分析。
3.1汽车怠速模式
汽车怠速模式是指发动机处于启动状态,但是汽车处于停止不前的状态,可以测得相应的数据。这里以汽车的横摆角速度数据进行分析,取了2500个采样点,利用数据的统计特性对数据分别求均值、协方差与功率谱密度,求得的均值为-7.7682e-005,近似为0.为了直观,把采集到的源数据、协方差与功率谱密度通过MATLAB作图的方式显示出来,如图6所示。
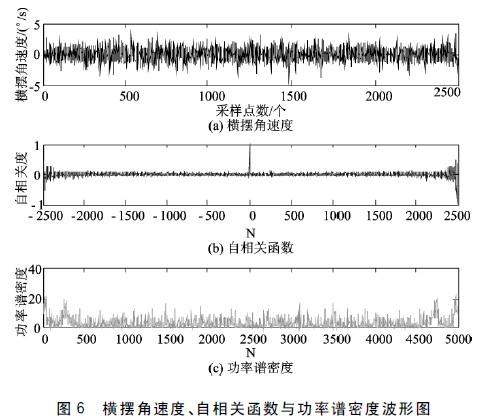
由图可知,自相关函数只有在横坐标为0时候才有取值,功率谱密度分布比较均匀,而且采集到的数据均值近似为0,这与高斯白噪声的统汁特性相似,因而断定干扰源类型为高斯白噪声。
3.2汽车正常运行模式
汽车正常运行模式是汽车匀速行驶在水平、下燥、水泥路面上,测得此时的汽车横摆角速度与侧向加速度。从传感器采集到的数据不可避免地受到干扰源的影响,由上面给出的结论可知干扰源类型为白噪声。卡尔曼滤波前的数据与滤波后的数据如图7所示。卡尔曼滤波对白噪声具有很好的滤波能力,它的滤波原理是最小均差原理,并且当前的数据只与前一个数据有关,数据存储量小,有利于计算机求解,所以选用卡尔曼滤波方式对采集到的数据进行滤波,从而得到相对准确的数据。这里采集了10 000个数据点。
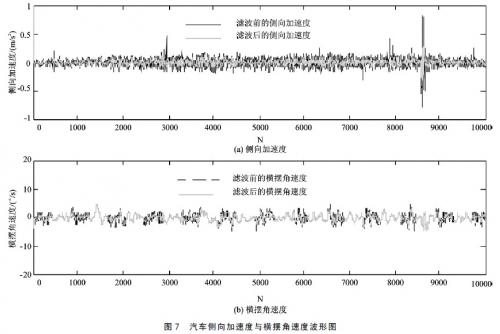
由图7可以看到,通过卡尔曼滤波后,曲线更加平滑,有效地剔除了杂波,从而为控制系统提供更准确的数据。
结语
本文采用ARM微控制器和ADIS16355传感器设计了一种数据采集系统,不但能够采集汽车的横摆角速度与侧向加速度两个参数,而且用卡尔曼滤波方式对采集到的数据滤掉了杂波,使得到的数据更为准确。经分析表明,该设计方案是可行的。这种数据采集系统在汽车主动安全方面有很好的应用价值,能为汽车稳定性分析供准确的数据。
立即加入汽车电子互动社区
ADIS16355 传感器 LPC2119 主动安全 相关文章:
- 另类传感器观念:汽车传感器(2)(11-30)
- 满足汽车高温应用环境要求的传感器接口IC(01-10)
- 构建可靠的容性传感器汽车开关和控制接口(01-06)
- 汽车HVAC系统中的传感器(02-23)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- 汽油发动机的传感器全面介绍(05-19)