基于DSP的快速公交专用车道检测
4 车道识别
本文在应用的基础上对合肥以及沈阳的BRT车道进行统计,其BRT车道相对其他车道具有如下特点:其左右车道线都为黄色,一般位于路的两边,道路的两边有栏杆或者路牙等特征。基于此特点,本文实现了BRT车道的识别系统,结合GPS判断其所在位置范围内有无BRT车道,若有则判断车道线颜色是否为黄色,即建立颜色模型,对车道线上的每一点颜色进行标记,并综合判断其左右车道线是否是黄色车道线,对黄色进行标记,如图9左图所示。由于车道线长期受到磨损有一定的失真,且在晚上黄光灯照射下不易准确地识别颜色,本文结合其栏杆、路牙等特征识别车道,对检测的车道线两边的一定区域(图9右图白色矩形区域)进行对比,比较其颜色边缘纹理等特征差别。通过大量的测试,本文得到了判断其是否为BRT车道的先验阈值,当矩形区域差别大于设定阈值时,则判断为公交专用车道,从而准确实现车道检测。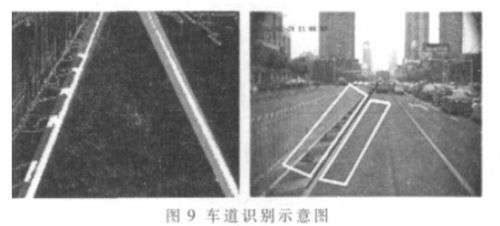
5 实验结果与分析
实现BRT 车道识别的具体流程如图10 所示。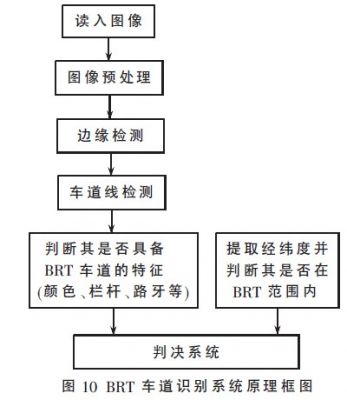
本文首先通过GPS采集车辆所在区域的经纬度信息, 并建立道路经纬度信息库判断车辆所在位置附近是否具备BRT专用车道,若有,则进行车道线检测,找到车辆所在车道的左右车道线,并判断车道线上颜色信息以及车道线左右的边缘亮度等信息,分析其是否具备BRT快速公交车道的特征,如具备,则可以作为监控前方车辆是否违规驶入BRT车道的一个依据。
6 改进应用
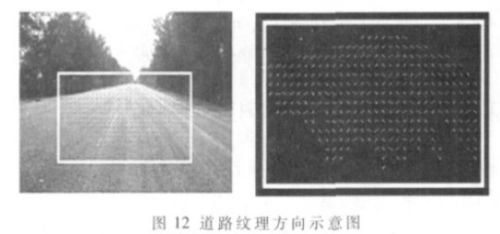
该模型不仅适用于公路等有车道线的结构化道路,也可适用于车辙痕迹较为清晰的乡间土路、没有车道线的柏油路等非结构化道路, 能够较为准确地检测道路的消失点。当车辆行进方向偏离其消失点时, 提醒司机采取相应的措施, 从而实现了车道偏离预警, 可以有效地抑制事故的发生。图12 为对白色区域进行Gabor 卷积运算, 将卷积结果较大( 即能量较大) 的点的方向绘制出来, 如图12 右图所示。可以看出, 方向基本指向道路的消失点。图13 为复杂道路的消失点, 其中圆圈表示消失点投票结果。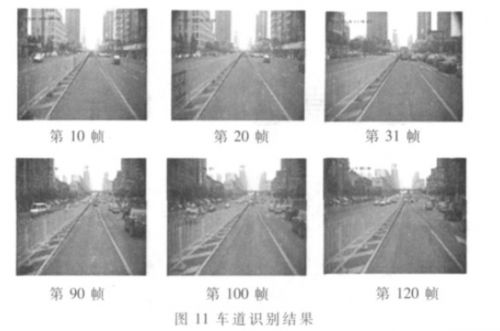
本文对合肥公交专用车道进行了大量的实验,实验结果表明,该算法具有很强的适用性,能够准确地检测到车辆所在车道的车道线,并对其车道作出正确的判断。车道识别结果如图11所示。
本文提出了基于道路纹理特征的车道线检测方法,将直线模型算法成功移植到DM6437开发平台。通过摄像头实时采集道路图像(25 S/s,图像大小为720×576),实时统计车道线信息,并在城市道路上进行了大量的实验测试,平均每帧图像的算法耗时控制在50 ms以内,能够较为准确地检测出车道线的位置,具有较强的实时性和鲁棒性。