基于单目视觉的智能车辆视觉导航系统设计
时间:01-09
来源:3721RD
点击:
3 试验结果
系统框架及所有算法在Boiland C++ Builder 6环境下编译完成。为了验证系统算法的可靠性和实时性,利用在合肥市环城高速公路上采集不同车型、不同路段、不同环境光下多组道路图像作为测试序列,进行了大量实验。
图3为典型道路场景下的实验结果,图3(a)为大型卡车;(b)为小型面包车;(c)为远距离处;(d)为近距离处的检测结果。系统将检测到的目标用黑框标记出来。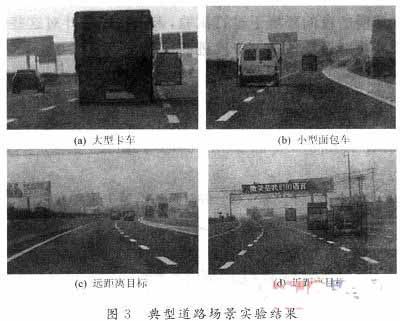
可以看出,系统能够检测到本车道内不同距离上的各种车型车辆。在高速公路上的实验结果表明,在最大车速100 km/h的情况下,系统在Celeron M 600 MHz处理器上的处理速度为8 j/s左右,也就是说处理一帧图像的时间内车辆行驶3~4 m,基本满足实时报警的要求。在一般光照条件下,系统正常报警的纵向距离超过200 m,视场角远远大于雷达(一般为±7°)。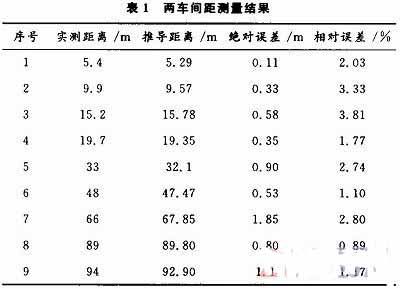
为了验证单目视觉测距准确性,在市内道路上采集了前车与本车距离从5~100 m的一组图像。对采集的图像进行处理后,根据公式推导出本车与前车距离以及实际距离见表1。表中数据显示,单目视觉测距的相对误差都在5%以内,可以满足实际工作中测距告警的需要。
4 结语
本文设计了一个基于单目视觉的汽车追尾预警系统。该系统采用了一种基于光密度差的道路检测算法,并使用了一种以车辆阴影检测为主、左右边缘检测为辅的车辆探测方法,同时采用了简单、实用的测距和报警方法。高速公路上的实验结果证明了该系统的实时性、鲁棒性和准确性。该系统目前还没有在雨雾天气或缺少照明的夜间环境下进行试验,未来我们将针对这些使用环境对系统做进一步改进和优化。