基于MSP430的车体自动调平系统
电路设计
主控器采用MSP430F149单片机,串口1经TTL-RS232电平转换接倾角传感器,用于接收传感器输出数据,串口2 TTL电平接无线数传模块,发送车体纵横向倾斜角度和调整角度至操纵指示器。主控制器及接口电路如图3所示。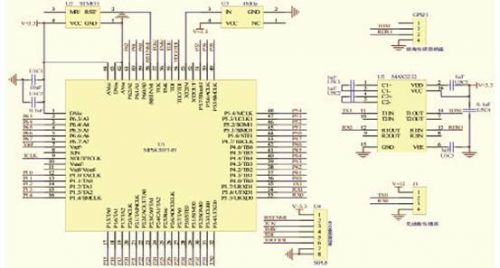
图3 主控器及接口电路图
(2)电源电路设计
电源采用12V/1000mAh的锂电池,直接为倾角传感器供电,再经两路DC-DC转换,分别转换至9V和3.3V,9V电源为无线数传模块供电,3.3V为主控制器及接口电路供电,充电电路采用LM317芯片,恒流方式充电。电源电路见图4所示。
(3)无线数传模块的选用
在一些多测试点的系统中,伴随传感器而来的是大量数据线缆。众多的线缆不仅带来布线的复杂不便,而且存在着短路、短线隐患,成本高,易老化,还给系统的调试和维护增加了难度。另外,在一些特殊的应用场合,需要将传感器放置在有危险的封闭环境中进行工作,试图通过连线的方法得到传感器的信号显然是有一定难度的。而采用无线方式来实现信号的传送,可以解决这一问题。相比有线传输,无线传输具有不占据空间、没有布线要求、成本低、可靠性高、维护方便及传输中的干扰较少等优点,这也在一定程度上提高了传输的可靠性。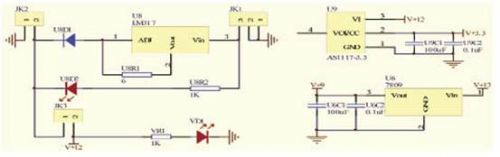
图4 电源电路图
根据实际情况,本文采用ZT-TR43F无线数传模块,它是一款无线收发一体的低功耗通信模块。该模块的技术指标如下:①载波频率为433MHz,工作频率为428MHz~435MHz;②最大发射功率5mW,接收灵敏度﹣105dBm;③采用FSK调制,采用前向信道纠错编码,抗干扰能力强;④有八个工作信道可供选择;⑤传输速率9.6kbps;⑥降低噪声放大器LNA、功率放大器PA、压空振荡器VCO等大部分功能集成在芯片内,外围电路简单易于开发。采用该无线数传模块,可以使车体调平装置满足某型火箭炮调平时的无线数传要求:①适当的通信距离,一般以不超过30m为宜,通信功率过大使通信距离过远,会造成炮与炮之间相互干扰;②较强的抗干扰能力,系统在较强的外界干扰中也能正常工作;③较低的功耗,该装置野外应用,无固定供电电源,只能靠电池维持系统运行。
无线模块ZT-TR43F与单片机接口提供了RS232/TTL/RS485三种接口方式,本系统采用TTL接口方式,方便与MSP430F149单片机的接口。其中MSP430单片机的RXD、TXD口分别与无线模块的TXD、RXD口相接,地线与地线相接。
考虑到多门火箭炮同时调平时,有多个调平装置同时工作,为防止之间相互干扰,采取不同的通信信道或不同编码方式识别,每个装置上带有拨码盘,通过拨码盘设置各自的通信信道或识别码。
调整角度的计算
主控制器接收到车体的纵横向倾斜角度后,需要计算每个千斤顶相对调整的角度,角度计算的几何关系见图5。
图5 角度计算关系图
如图5所示,车体水平倾斜角度可反映在横向和纵向两个方向,图5中a和b分别为横向和纵向倾斜角度,设α和β为倾角传感器得出的横向和纵向角度。若α大于0,则A端千斤顶打高,B端千斤顶打低。两端千斤顶各位移约为α/2乘以AB端点间隔的一半的距离,然后调整千斤顶直到横向水准气泡居中。若β大于0,则A端和B端同时打低,若β小于0,则A端和B端同时打高。打高过程中调整千斤顶直到纵向水准气泡居中。
软件设计
(1)软件功能
软件功能主要有:①检测操纵指示器连接状态;②连续读取纵横向倾斜角度并求平均值;③将角度值发送给操纵指示器。
(2)开发平台
软件开发选择与装置硬件中单片机相适应的IAR开发平台,使用C语言开发。
(3)软件流程
调平软件完成读取纵向与横向倾斜角度值、模拟显示水准气泡指示、计算并显示左右千斤顶调整方向等功能,其工作流程如图6所示,其中单片机读取角度数据的流程如图7所示。车体调平装置端程序通过串口读取到倾角传感器的纵、向倾斜角度值,根据角度值分别计算出左、右千斤顶的调整方向和模拟水准气泡的中心位置坐标,然后将这些值通过串行通信分别发送到左、右操纵指示器上。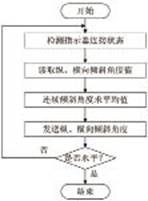
图6 车体调平装置软件流程图
图7 读取角度数据流程图
结束语
高精度调平装置主要用于车载火箭炮平台和导弹发射平台等,本文针对传统车载平台依靠人工手动调整平台水平,从而导致调整时间长、精度低,进而限制影响到火箭炮等武器的机动性和快速反应能力,提出了个人的观点和设计。本文基于MSP430F149单片机,对某型火箭炮车体调平装置的控制原理和结构设计进行了阐述。该调平装置将传感器、数据模块和无线数传技术有机地结合在一起,可实现车体倾斜度的自动快速检测、计算和传输。该装置具有检测迅速、控制灵活和操作简单等优点,能有效提高某型火箭炮的机动性
- 基于MSP430自动往返小车的设计(11-24)