基于MSP430的车体自动调平系统
倾角传感器用于感应火箭炮车体的纵横向倾斜度,基本技术要求:①精度高于±0.012°;②使用环境温度为﹣40℃~﹢55℃。根据这些要求,选用北京星网宇达科技公司的TW-TS1110倾角传感器。该传感器内部采用高速数字处理器,对多维重力加速度信息进行处理与姿态角解算,并采用角度数字输出模式,输出速度为5Hz,测量范围为±15°。测量精度:当倾角≤±5°时,精度为±0.005°;当倾角≤±15°时,精度为±0.01°;当倾角≤±30°时,精度为±0.035°。传感器利用光刻电阻技术补偿非线性误差,解决了传统倾角传感器只有在小范围才能保证精度的现象,使得倾角传感器在全测量范围内线性化,保持同一额定精度指标。传感器还采用启动零位测试补偿技术,具有快速稳定输出能力,单点重复性为0.0015°;采用动态数字滤波技术,输出噪声低,且具有较高的分辨率,分辨率为0.002°,传感器内部采用动态零位与标度因数自校正技术。适合多种环境使用,使用环境温度为﹣40℃~﹢55℃。
传感器包数据输出格式
1 发送数据格式定义
①ASCII码发送格式(单角度):24 FF XX XX XX XX XX 0D 0A
说明--24:头标识$;FF:角度值的符号位(+2b/-2d);XX:ASCII码角度值(30~39);0D 0A:角度发送字尾标识符(换行,回车)。
②二进制码发送格式(单角度):AA XX XX CC
AA:角度发送字头标识符;XX:带符号二进制数。5度倾角标度:6000bit/度;15度倾角标度:2000bit/度;30度倾角标度:1000bit/度;60度倾角标度:500bit/度。
CC:校验码;CC=数据字节1+数据字节2。
2 接受命令格式定义
读角度命令格式如图2所示。该命令仅在应答工作模式下有效。每个传感器都有固定ID字(FFFF)和用户ID字(用户可设定,初始为0000),2个ID字都可读角度。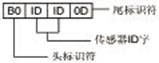
图2 读角度命令格式
数据处理与无线数传电路设计
无线数传系统是无线数字传输系统的简称,该系统以无线数传模块为平台,在不影响装备功能情况下,实现数字终端之间数字信息的无线传输。数据处理与无线数传的主要任务是接收倾角传感器的数据输出,计算每个千斤顶相对车体水平面所要调整的角度,并通过无线数传模块传输给操纵指示器。
MSP430F149单片机简介
单片机具有可靠性高、功耗低、扩展灵活、体积小、价格低和使用方便等优点,广泛应用于仪器仪表、专用设备智能化管理及过程控制等领域,有效地提高了控制质量与经济效益。本设计选用TI公司的16位超低功耗混合型微处理器MSP430F149(见图3)作为核心控制器,它的主要特点是:
(1)低电压、超低功耗
该单片机的电源电压采用1.8V~3.6V低电压,RAM数据保持方式下耗电仅0.1μA,在2.2V、1MHz主频的活动模式时工作电流为280μA,I/O输入端口的漏电流最大仅50nA。
(2)强大的处理能力
该单片机为16位的精简指令集(RISC)结构,具有丰富的寻址方式(7种源操作数寻址、4种目的操作数寻址)、简洁的27条内核指令以及大量的模拟指令;大量的寄存器以及片内数据存储器都可参加多种运算,还有高效的查表处理方法及较高的处理速度,一个时钟周期可以执行一条指令,使单片机在8MHz晶振工作时,指令速度可达8MIPS。
(3)丰富的片上外围模块
该单片机集成了较丰富的片内外设:模拟比较器A、定时器A、定时器B、串行通信接口USART0和USART1、硬件乘法器、12位ADC、端口1~6、看门狗等。
(4)系统工作稳定
该单片机在上电复位后,首先由DCOCLK启动CPU,保证程序从正确的位置开始执行,同时也保证了晶体振荡器有足够的起振和稳定时间;之后通过软件可设置适当的寄存器的控制位来确定最后的系统时钟频率。在CPU运行中,如果MCLK发生故障,DCO会自动启动,以确保系统正常工作。如果程序跑飞,可以用看门狗将其复位。
(5)方便高效的开发环境
MSP430F149片内有JTAG调试接口,还有可电擦写的FLASH存储器,因此采用先通过JTAG接口下载程序到FLASH内,再由JTAG接口控制程序运行、读取片内CPU状态,以及存储器内容等信息供设计者调试。由于单片机可支持串行在线编程,使开发变得更加简便,并且开发的仿真器价格低廉,不需要昂贵的编程器。
无线数传电路的设计
数据处理与无线数传电路设计主要包括主控制器电路、倾角传感器接口电路、无线数传模块接口电路、电源电路等。基本工作原理是:系统通上电后,主控制器控制倾角传感器按固定间隔检测火箭炮车体姿态,将接收到的检测结果运算处理,计算每个千斤顶的调整量,再通过无线数传模块发送给操纵指示器。
(1)主控制器及接口
- 基于MSP430自动往返小车的设计(11-24)